
가격협의 상품 및 유료상품의 구매를 원하실 경우 맞춤형 데이터 신청란에 글을 남겨주시면
신속히 답변드리도록 하겠습니다.




| 데이터 제공 포맷 | 데이터 제공 방식 | 데이터 파일 용량 |
|---|---|---|
| csv/zip | 다운로드 | 415.84 MB |
₩0
| 데이터셋명 | 로봇공학 기술분야 개별 특허별 분석 파라미터 데이터 | 데이터 유형 | csv/zip |
|---|---|---|---|
| 데이터 분야 | 특허 | 구축 데이터량 | 415.84 MB |
| 구축기관 | 광개토연구소 | 데이터 갱신 일자 | 2024-09-20 |
| 데이터 개방 일자 | 2021-09-16 | 데이터 이용 기한 | 무기한 |
| 데이터 갱신 주기 | - | 버전 | 1.0 |
| 주요 키워드 | 로봇공학, 특허, 특허 동향, 시계열, 기술동향 | ||
| 벨류체인 키워드 | 기술획득 | ||
| 소개 | 로봇공학 기술분야 개별 특허별 분석 파라미터 데이터 | ||
■ 기간 및 범위
- 기간 범위: 최근 11년 (2012~2022) / 국가 범위: 미국,한국,중국,일본,유럽
■ 활용 예제
- 본 데이터 상품을 활용하여 사용자는 다음과 같은 정보를 확인할 수 있습니다.
(상세한 활용 예제는 상품 정보 중 '데이터 활용사례' 탭을 클릭해주세요.)
1) 기술분야 계층 구조
2) 기술 키워드 국문
3) 국가 코드
4) 인용/피인용 집계 정보
5) 특허 패밀리 집계 정보
6) 특허 거래 집계 정보(M&A 포함)
7) 소송/심판 관련 정보(집계 정보 및 발생일, 연도 등)
8) 특허 정보(ID, 출원/공개/등록 일자, 번호, 권리자명 등)
| TCHNL_RELM_ID | TCHNL_RELM_NM | TCHNL_RELM_DEPT_CD | TCHNL_RELM_DEPT_1_NM | TCHNL_RELM_DEPT_2_NM | TCHNL_RELM_DEPT_3_NM | TCHNL_RELM_DEPT_4_NM | NTN_CD | ANLSS_CNCNS_URL | PTNT_ID | AL_JUDGE_CTCNT | THYR_JUDGE_CTCNT | YR1_BFR_JUDGE_CTCNT | YR2_BFR_JUDGE_CTCNT | YR3_BFR_JUDGE_CTCNT | YR4_BFR_JUDGE_CTCNT | YR5_BFR_JUDGE_CTCNT | YR6_BFR_JUDGE_CTCNT | YR7_BFR_JUDGE_CTCNT | YR8_BFR_JUDGE_CTCNT | YR9_BFR_JUDGE_CTCNT | YR10_BFR_JUDGE_CTCNT | AL_CTCNT | THYR_CTCNT | YR1_BFR_CTCNT | YR2_BFR_CTCNT | YR3_BFR_CTCNT | YR4_BFR_CTCNT | YR5_BFR_CTCNT | YR6_BFR_CTCNT | AL_OVJDG_CTCNT | THYR_OVJDG_CTCNT | YR1_BFR_OVJDG_CTCNT | YR2_BFR_OVJDG_CTCNT | YR3_BFR_OVJDG_CTCNT | YR4_BFR_OVJDG_CTCNT | YR5_BFR_OVJDG_CTCNT | YR6_BFR_OVJDG_CTCNT | YR7_BFR_OVJDG_CTCNT | YR8_BFR_OVJDG_CTCNT | YR9_BFR_OVJDG_CTCNT | YR10_BFR_OVJDG_CTCNT | AL_MGNTC_CTCNT | THYR_MGNTC_CTCNT | YR1_BFR_MGNTC_CTCNT | YR2_BFR_MGNTC_CTCNT | YR3_BFR_MGNTC_CTCNT | YR4_BFR_MGNTC_CTCNT | YR5_BFR_MGNTC_CTCNT | YR6_BFR_MGNTC_CTCNT | YR7_BFR_MGNTC_CTCNT | YR8_BFR_MGNTC_CTCNT | YR9_BFR_MGNTC_CTCNT | YR10_BFR_MGNTC_CTCNT | AL_OVRSS_FMCNT | THYR_OVRSS_FMCNT | YR1_BFR_OVRSS_FMCNT | YR2_BFR_OVRSS_FMCNT | YR3_BFR_OVRSS_FMCNT | YR4_BFR_OVRSS_FMCNT | YR5_BFR_OVRSS_FMCNT | YR6_BFR_OVRSS_FMCNT | YR7_BFR_OVRSS_FMCNT | YR8_BFR_OVRSS_FMCNT | YR9_BFR_OVRSS_FMCNT | YR10_BFR_OVRSS_FMCNT | AL_DLNGS_PTCNT | THYR_DLNGS_PTCNT | YR1_BFR_DLNGS_PTCNT | YR2_BFR_DLNGS_PTCNT | YR3_BFR_DLNGS_PTCNT | YR4_BFR_DLNGS_PTCNT | YR5_BFR_DLNGS_PTCNT | YR6_BFR_DLNGS_PTCNT | AL_UNMRG_RLDLN_PTCNT | THYR_UNMRG_RLDLN_PTCNT | YR1_BFR_UNMRG_RLDLN_PTCNT | YR2_BFR_UNMRG_RLDLN_PTCNT | YR3_BFR_UNMRG_RLDLN_PTCNT | YR4_BFR_UNMRG_RLDLN_PTCNT | YR5_BFR_UNMRG_RLDLN_PTCNT | YR6_BFR_UNMRG_RLDLN_PTCNT | AL_PTNT_LWS_CNT | THYR_PTNT_LWS_CNT | YR1_BFR_PTNT_LWS_CNT | YR2_BFR_PTNT_LWS_CNT | YR3_BFR_PTNT_LWS_CNT | YR4_BFR_PTNT_LWS_CNT | YR5_BFR_PTNT_LWS_CNT | YR6_BFR_PTNT_LWS_CNT | AL_PTNT_RFRNG_CNT | THYR_PTNT_RFRNG_CNT | YR1_BFR_PTNT_RFRNG_CNT | YR2_BFR_PTNT_RFRNG_CNT | YR3_BFR_PTNT_RFRNG_CNT | YR4_BFR_PTNT_RFRNG_CNT | YR5_BFR_PTNT_RFRNG_CNT | YR6_BFR_PTNT_RFRNG_CNT | INVNTN_NM | FRST_LWS_DT | RCNT_LWS_DT | FRST_LWS_YR | RCNT_LWS_YR | FRST_RFRNG_DT | RCNT_RFRNG_DT | FRST_RFRNG_YR | RCNT_RFRNG_YR | APPLC_DT | OTTPB_DT | RGSTN_DT | FRST_OFRPR_PBLCA_DT | RCNT_OFRPR_PBLCA_DT | APNUMB | OTTPB_NO | RGNO | MIN_CPC_CD_CONT | AL_CPC_CD_CONT | MIN_IPC_CD_CONT | AL_IPC_CD_CONT | NOW_RGPRS_NM_GROUP_CONT | BEFR_RGPRS_NM_GROUP_CONT | APPLN_NM_GROUP_CONT | NOW_RGPRS_NTNLT_CD_GROUP_CONT | BFRGPRS_NTNLT_CD_GROUP_CONT | APPLN_NTNLT_CD_GROUP_CONT | RGPRS_HOLD_RGSTN_PTCNT | INVNO_NM_GROUP_CONT | opert_sctin_cd | data_crtin_dt | cntct_prces_stts_cd | cntct_prces_dt | |||
| 44319 | 로봇 청소 기계 | 3 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 청소 기계 [A47L2201/00_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016102961086B | CN2016102961086B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 驱动轮总成及具有该驱动轮总成的机器人吸尘器 | 20120903 | 20130313 | 20161207 | 20130313 | 20161207 | 201210322214.1 | 102961086 | 102961086 | A47L2201/06 | A47L2201/06 || A47L9/009 | A47L5/14 | A47L5/14 || A47L9/28 | Samsung Electronics | KR | KR | 35258 | I | 20240920 | N | |||||||||||||||||
| 44318 | 로봇 청소 관련 추가 세부 정보 | 2 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103492251B | CN2016103492251B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 车辆及车辆用控制方法 | 20110422 | 20160420 | 20160420 | 20160420 | 201180070335.5 | 103492251 | B60W20/00 | B60K6/445 || B60L11/123 || B60L11/14 || B60L11/1859 || B60L11/1862 || B60L2210/14 || B60L2210/40 || B60L2240/12 || B60L2240/547 || B60L2240/549 || B60L2240/80 || B60W10/06 || B60W10/08 || B60W20/00 || B60W2510/244 || B60W2520/10 || B60W2710/086 || Y02T10/6217 || Y02T10/6239 || Y02T10/6286 || Y02T10/7005 || Y02T10/7011 || Y02T10/7044 || Y02T10/705 || Y02T10/7077 || Y02T10/7225 || Y02T10/7241 || Y10S901/01 || Y10S903/93 | B60W10/26 | B60W10/26 || B60W20/14 | Toyota Motor | JP | JP | 22410 | I | 20240920 | N | ||||||||||||||||||||
| 44360 | 로봇 | 3 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 [Y10S901/00_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103492251B | CN2016103492251B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 车辆及车辆用控制方法 | 20110422 | 20160420 | 20160420 | 20160420 | 201180070335.5 | 103492251 | B60W20/00 | B60K6/445 || B60L11/123 || B60L11/14 || B60L11/1859 || B60L11/1862 || B60L2210/14 || B60L2210/40 || B60L2240/12 || B60L2240/547 || B60L2240/549 || B60L2240/80 || B60W10/06 || B60W10/08 || B60W20/00 || B60W2510/244 || B60W2520/10 || B60W2710/086 || Y02T10/6217 || Y02T10/6239 || Y02T10/6286 || Y02T10/7005 || Y02T10/7011 || Y02T10/7044 || Y02T10/705 || Y02T10/7077 || Y02T10/7225 || Y02T10/7241 || Y10S901/01 || Y10S903/93 | B60W10/26 | B60W10/26 || B60W20/14 | Toyota Motor | JP | JP | 22410 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103492251B | CN2016103492251B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 车辆及车辆用控制方法 | 20110422 | 20160420 | 20160420 | 20160420 | 201180070335.5 | 103492251 | B60W20/00 | B60K6/445 || B60L11/123 || B60L11/14 || B60L11/1859 || B60L11/1862 || B60L2210/14 || B60L2210/40 || B60L2240/12 || B60L2240/547 || B60L2240/549 || B60L2240/80 || B60W10/06 || B60W10/08 || B60W20/00 || B60W2510/244 || B60W2520/10 || B60W2710/086 || Y02T10/6217 || Y02T10/6239 || Y02T10/6286 || Y02T10/7005 || Y02T10/7011 || Y02T10/7044 || Y02T10/705 || Y02T10/7077 || Y02T10/7225 || Y02T10/7241 || Y10S901/01 || Y10S903/93 | B60W10/26 | B60W10/26 || B60W20/14 | Toyota Motor | JP | JP | 22410 | I | 20240920 | N | |||||||||||||||||||||
| 44361 | 이동 로봇 | 4 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 [Y10S901/00_all] | 이동 로봇 [Y10S901/01_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103492251B | CN2016103492251B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 车辆及车辆用控制方法 | 20110422 | 20160420 | 20160420 | 20160420 | 201180070335.5 | 103492251 | B60W20/00 | B60K6/445 || B60L11/123 || B60L11/14 || B60L11/1859 || B60L11/1862 || B60L2210/14 || B60L2210/40 || B60L2240/12 || B60L2240/547 || B60L2240/549 || B60L2240/80 || B60W10/06 || B60W10/08 || B60W20/00 || B60W2510/244 || B60W2520/10 || B60W2710/086 || Y02T10/6217 || Y02T10/6239 || Y02T10/6286 || Y02T10/7005 || Y02T10/7011 || Y02T10/7044 || Y02T10/705 || Y02T10/7077 || Y02T10/7225 || Y02T10/7241 || Y10S901/01 || Y10S903/93 | B60W10/26 | B60W10/26 || B60W20/14 | Toyota Motor | JP | JP | 22410 | I | 20240920 | N | ||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103612256B | CN2016103612256B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 大行程水平移动平台 | 20131128 | 20160330 | 20160330 | 20160330 | 201310614972.5 | 103612256 | B25J9/00 | B25J9/00 | Dongguan Polytechnic || DONGGUAN SONGQING INTELLIGENT AUTOMATION TECHNOLOGY | CN | CN | 824 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103612256B | CN2016103612256B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 大行程水平移动平台 | 20131128 | 20160330 | 20160330 | 20160330 | 201310614972.5 | 103612256 | B25J9/00 | B25J9/00 | Dongguan Polytechnic || DONGGUAN SONGQING INTELLIGENT AUTOMATION TECHNOLOGY | CN | CN | 824 | I | 20240920 | N | ||||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016103612256B | CN2016103612256B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 大行程水平移动平台 | 20131128 | 20160330 | 20160330 | 20160330 | 201310614972.5 | 103612256 | B25J9/00 | B25J9/00 | Dongguan Polytechnic || DONGGUAN SONGQING INTELLIGENT AUTOMATION TECHNOLOGY | CN | CN | 824 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016104385273B | CN2016104385273B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人系统及其同时表演控制方法 | 20131122 | 20160622 | 20160622 | 20160622 | 201310601216.9 | 104385273 | B25J9/1682 | B25J9/161 || B25J9/1682 || G06N3/008 | B25J11/00 | B25J11/00 || B25J13/00 || B25J9/16 | JIAXING DEBAOWEI MICROELECTRONICS | CN | CN | 14 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016104385273B | CN2016104385273B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人系统及其同时表演控制方法 | 20131122 | 20160622 | 20160622 | 20160622 | 201310601216.9 | 104385273 | B25J9/1682 | B25J9/161 || B25J9/1682 || G06N3/008 | B25J11/00 | B25J11/00 || B25J13/00 || B25J9/16 | JIAXING DEBAOWEI MICROELECTRONICS | CN | CN | 14 | I | 20240920 | N | ||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016104385273B | CN2016104385273B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人系统及其同时表演控制方法 | 20131122 | 20160622 | 20160622 | 20160622 | 201310601216.9 | 104385273 | B25J9/1682 | B25J9/161 || B25J9/1682 || G06N3/008 | B25J11/00 | B25J11/00 || B25J13/00 || B25J9/16 | JIAXING DEBAOWEI MICROELECTRONICS | CN | CN | 14 | I | 20240920 | N | |||||||||||||||||||
| 44200 | [프로그램 제어] 수행되는 업무에 특징이 있는 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | [프로그램 제어] 수행되는 업무에 특징이 있는 것 [B25J9/1679_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016104385273B | CN2016104385273B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人系统及其同时表演控制方法 | 20131122 | 20160622 | 20160622 | 20160622 | 201310601216.9 | 104385273 | B25J9/1682 | B25J9/161 || B25J9/1682 || G06N3/008 | B25J11/00 | B25J11/00 || B25J13/00 || B25J9/16 | JIAXING DEBAOWEI MICROELECTRONICS | CN | CN | 14 | I | 20240920 | N | ||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016104385273B | CN2016104385273B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人系统及其同时表演控制方法 | 20131122 | 20160622 | 20160622 | 20160622 | 201310601216.9 | 104385273 | B25J9/1682 | B25J9/161 || B25J9/1682 || G06N3/008 | B25J11/00 | B25J11/00 || B25J13/00 || B25J9/16 | JIAXING DEBAOWEI MICROELECTRONICS | CN | CN | 14 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105345809A | CN2016105345809A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 六自由度串并联机构 | 20151214 | 20160224 | 20160224 | 20160224 | 201510927533.9 | 105345809 | B25J9/0033 | B25J9/0033 | B25J9/00 | B25J9/00 | Jiamusi University | CN | CN | 2858 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105345809A | CN2016105345809A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 六自由度串并联机构 | 20151214 | 20160224 | 20160224 | 20160224 | 201510927533.9 | 105345809 | B25J9/0033 | B25J9/0033 | B25J9/00 | B25J9/00 | Jiamusi University | CN | CN | 2858 | I | 20240920 | N | ||||||||||||||||||||
| 44143 | [프로그램 제어 메니플레이터] 평행 운동을 가지는 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | [프로그램 제어 메니플레이터] 평행 운동을 가지는 것 [B25J9/003_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105345809A | CN2016105345809A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 六自由度串并联机构 | 20151214 | 20160224 | 20160224 | 20160224 | 201510927533.9 | 105345809 | B25J9/0033 | B25J9/0033 | B25J9/00 | B25J9/00 | Jiamusi University | CN | CN | 2858 | I | 20240920 | N | ||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105345809A | CN2016105345809A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 六自由度串并联机构 | 20151214 | 20160224 | 20160224 | 20160224 | 201510927533.9 | 105345809 | B25J9/0033 | B25J9/0033 | B25J9/00 | B25J9/00 | Jiamusi University | CN | CN | 2858 | I | 20240920 | N | |||||||||||||||||||
| 44262 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 [B25J15/04_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105397827A | CN2016105397827A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种玻璃制品夹持装置 | 20151111 | 20160316 | 20160316 | 20160316 | 201510763348.0 | 105397827 | B25J15/06 | B25J15/06 || B25J15/08 | Taicang Lunwen Machinery | Taicang Lunwen Machinery | CN | CN | 43 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105397827A | CN2016105397827A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种玻璃制品夹持装置 | 20151111 | 20160316 | 20160316 | 20160316 | 201510763348.0 | 105397827 | B25J15/06 | B25J15/06 || B25J15/08 | Taicang Lunwen Machinery | Taicang Lunwen Machinery | CN | CN | 43 | I | 20240920 | N | ||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105397827A | CN2016105397827A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种玻璃制品夹持装置 | 20151111 | 20160316 | 20160316 | 20160316 | 201510763348.0 | 105397827 | B25J15/06 | B25J15/06 || B25J15/08 | Taicang Lunwen Machinery | Taicang Lunwen Machinery | CN | CN | 43 | I | 20240920 | N | ||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105397827A | CN2016105397827A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种玻璃制品夹持装置 | 20151111 | 20160316 | 20160316 | 20160316 | 201510763348.0 | 105397827 | B25J15/06 | B25J15/06 || B25J15/08 | Taicang Lunwen Machinery | Taicang Lunwen Machinery | CN | CN | 43 | I | 20240920 | N | |||||||||||||||||||||
| 44249 | 손에 의하여 적당한 장소로 놓여질 수 있는 메니플레이터 | 3 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 손에 의하여 적당한 장소로 놓여질 수 있는 메니플레이터 [B25J1/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105459076A | CN2016105459076A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 新型手动夹持装置 | 20160105 | 20160406 | 20160406 | 20160406 | 201610001769.4 | 105459076 | B25J1/04 | B25J1/04 | B25J1/04 | B25J1/04 | Nantong Xunda Rubber Plastic Manufacturing | CN | CN | 58 | I | 20240920 | N | |||||||||||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105459076A | CN2016105459076A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 新型手动夹持装置 | 20160105 | 20160406 | 20160406 | 20160406 | 201610001769.4 | 105459076 | B25J1/04 | B25J1/04 | B25J1/04 | B25J1/04 | Nantong Xunda Rubber Plastic Manufacturing | CN | CN | 58 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105459076A | CN2016105459076A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 新型手动夹持装置 | 20160105 | 20160406 | 20160406 | 20160406 | 201610001769.4 | 105459076 | B25J1/04 | B25J1/04 | B25J1/04 | B25J1/04 | Nantong Xunda Rubber Plastic Manufacturing | CN | CN | 58 | I | 20240920 | N | |||||||||||||||||||||
| 44251 | [손에 의하여 적당한 장소로 놓여질 수 있는 메니플레이터] 강체 | 4 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 손에 의하여 적당한 장소로 놓여질 수 있는 메니플레이터 [B25J1/00_main] | [손에 의하여 적당한 장소로 놓여질 수 있는 메니플레이터] 강체 [B25J1/04_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105459076A | CN2016105459076A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 新型手动夹持装置 | 20160105 | 20160406 | 20160406 | 20160406 | 201610001769.4 | 105459076 | B25J1/04 | B25J1/04 | B25J1/04 | B25J1/04 | Nantong Xunda Rubber Plastic Manufacturing | CN | CN | 58 | I | 20240920 | N | ||||||||||||||||||
| 23 | 카메라에서 부터 상당히 상이한 범위에서의 객체를 포함하는 보행자 또는 로봇에 의해 작동되는 카메라에 의해 잡힐수있는 장면의 인식 | 4 | 인공지능 | 이미지 인식 | 문자/패턴 인식 [G06K9/00_all] | 장면 인식 [G06K9/00624_all] | 카메라에서 부터 상당히 상이한 범위에서의 객체를 포함하는 보행자 또는 로봇에 의해 작동되는 카메라에 의해 잡힐수있는 장면의 인식 [G06K9/00664_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016105760475A | CN2016105760475A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种推荐视频中相关物品的方法及装置 | 20160214 | 20160713 | 20160713 | 20160713 | 201610084919.2 | 105760475 | G06F16/7837 | G06F16/7837 || G06F17/3079 || G06K9/00664 | G06F17/30 | G06F17/30 || G06K9/00 | TVM TECHNOLOGY | CN | CN | 879 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003023A | CN2016106003023A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 1 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人运动控制系统和方法 | 20160525 | 20161012 | 20161012 | 20161012 | 201610357485.9 | 106003023 | B25J9/023 | B25J9/023 || B25J9/1605 || G05B2219/40527 | B25J9/16 | B25J9/02 || B25J9/16 | Zhuhai Gree Intelligent Equipment | CN | CN | 2751 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003023A | CN2016106003023A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 1 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人运动控制系统和方法 | 20160525 | 20161012 | 20161012 | 20161012 | 201610357485.9 | 106003023 | B25J9/023 | B25J9/023 || B25J9/1605 || G05B2219/40527 | B25J9/16 | B25J9/02 || B25J9/16 | Zhuhai Gree Intelligent Equipment | CN | CN | 2751 | I | 20240920 | N | ||||||||||||||||||||
| 44150 | [프로그램 제어 메니플레이터] 암의 운동에 의해 특징지어진 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | [프로그램 제어 메니플레이터] 암의 운동에 의해 특징지어진 것 [B25J9/02_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003023A | CN2016106003023A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 1 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人运动控制系统和方法 | 20160525 | 20161012 | 20161012 | 20161012 | 201610357485.9 | 106003023 | B25J9/023 | B25J9/023 || B25J9/1605 || G05B2219/40527 | B25J9/16 | B25J9/02 || B25J9/16 | Zhuhai Gree Intelligent Equipment | CN | CN | 2751 | I | 20240920 | N | ||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003023A | CN2016106003023A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 1 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 机器人运动控制系统和方法 | 20160525 | 20161012 | 20161012 | 20161012 | 201610357485.9 | 106003023 | B25J9/023 | B25J9/023 || B25J9/1605 || G05B2219/40527 | B25J9/16 | B25J9/02 || B25J9/16 | Zhuhai Gree Intelligent Equipment | CN | CN | 2751 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003037A | CN2016106003037A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种家用和医用服务机器人及其工作方法 | 20160617 | 20161012 | 20161012 | 20161012 | 201610429733.6 | 106003037 | B25J9/1602 | B25J9/1602 | B25J9/16 | B25J9/16 | BOAT INFORMATION TECHNOLOGY | CN | CN | 12 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003037A | CN2016106003037A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种家用和医用服务机器人及其工作方法 | 20160617 | 20161012 | 20161012 | 20161012 | 201610429733.6 | 106003037 | B25J9/1602 | B25J9/1602 | B25J9/16 | B25J9/16 | BOAT INFORMATION TECHNOLOGY | CN | CN | 12 | I | 20240920 | N | ||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003037A | CN2016106003037A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种家用和医用服务机器人及其工作方法 | 20160617 | 20161012 | 20161012 | 20161012 | 201610429733.6 | 106003037 | B25J9/1602 | B25J9/1602 | B25J9/16 | B25J9/16 | BOAT INFORMATION TECHNOLOGY | CN | CN | 12 | I | 20240920 | N | |||||||||||||||||||
| 44184 | [프로그램 제어] 제어 시스템 | 구조 | 건설에 특징이 있는 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | [프로그램 제어] 제어 시스템 | 구조 | 건설에 특징이 있는 것 [B25J9/1602_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003037A | CN2016106003037A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种家用和医用服务机器人及其工作方法 | 20160617 | 20161012 | 20161012 | 20161012 | 201610429733.6 | 106003037 | B25J9/1602 | B25J9/1602 | B25J9/16 | B25J9/16 | BOAT INFORMATION TECHNOLOGY | CN | CN | 12 | I | 20240920 | N | ||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106003037A | CN2016106003037A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种家用和医用服务机器人及其工作方法 | 20160617 | 20161012 | 20161012 | 20161012 | 201610429733.6 | 106003037 | B25J9/1602 | B25J9/1602 | B25J9/16 | B25J9/16 | BOAT INFORMATION TECHNOLOGY | CN | CN | 12 | I | 20240920 | N | |||||||||||||||||||
| 44318 | 로봇 청소 관련 추가 세부 정보 | 2 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | ||||||||||||||||||||
| 44375 | 팔 부분 | 4 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 [Y10S901/00_all] | 팔 부분 [Y10S901/27_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | ||||||||||||||||||
| 44280 | 손목(Wrist)조인트 | 4 | 로봇 공학 | 로봇의 구성 요소 | 접속부(joint) [B25J17/00_main] | 손목(Wrist)조인트 [B25J17/02_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | ||||||||||||||||||
| 44360 | 로봇 | 3 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 [Y10S901/00_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | |||||||||||||||||||||
| 44279 | 접속부(joint) | 3 | 로봇 공학 | 로봇의 구성 요소 | 접속부(joint) [B25J17/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | |||||||||||||||||||
| 44371 | 팔용 구동 시스템 | 4 | 로봇 공학 | 로봇 청소 관련 추가 세부 정보 | 로봇 [Y10S901/00_all] | 팔용 구동 시스템 [Y10S901/19_all] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | ||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016106163746A | CN2016106163746A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 类人机器人的关节机构 | 20150319 | 20161123 | 20161123 | 20161123 | 201580017457.6 | 106163746 | B25J17/0241 | B25J17/0241 || B25J9/102 || F16H1/32 || F16H2001/325 || Y10S901/25 || Y10S901/28 | B25J17/00 | B25J17/00 || F16H1/32 | Nabtesco | JP | JP | 648 | I | 20240920 | N | ||||||||||||||||||||
| 44262 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 [B25J15/04_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016204935667U | CN2016204935667U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种硅片吸板装置 | 20150901 | 20160106 | 20160106 | 20160106 | 201520670772.6 | 204935667 | B25J15/06 | B25J15/06 | SHENZHEN S C NEW ENERGY TECHNOLOGY | CN | CN | 191 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016204935667U | CN2016204935667U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种硅片吸板装置 | 20150901 | 20160106 | 20160106 | 20160106 | 201520670772.6 | 204935667 | B25J15/06 | B25J15/06 | SHENZHEN S C NEW ENERGY TECHNOLOGY | CN | CN | 191 | I | 20240920 | N | |||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016204935667U | CN2016204935667U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种硅片吸板装置 | 20150901 | 20160106 | 20160106 | 20160106 | 201520670772.6 | 204935667 | B25J15/06 | B25J15/06 | SHENZHEN S C NEW ENERGY TECHNOLOGY | CN | CN | 191 | I | 20240920 | N | |||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016204935667U | CN2016204935667U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种硅片吸板装置 | 20150901 | 20160106 | 20160106 | 20160106 | 201520670772.6 | 204935667 | B25J15/06 | B25J15/06 | SHENZHEN S C NEW ENERGY TECHNOLOGY | CN | CN | 191 | I | 20240920 | N | ||||||||||||||||||||||
| 44262 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 헤드 또는 다른 부분을 원격분리 또는 원격 교환하기 위한 장치를 가지는 것 [B25J15/04_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205058060U | CN2016205058060U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种触动式吸盘装置 | 20150916 | 20160302 | 20160302 | 20160302 | 201520714965.7 | 205058060 | B25J15/06 | B25J15/06 | LANXI BAIYING PHOTO FRAME FACTORY | CN | CN | 52 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205058060U | CN2016205058060U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种触动式吸盘装置 | 20150916 | 20160302 | 20160302 | 20160302 | 201520714965.7 | 205058060 | B25J15/06 | B25J15/06 | LANXI BAIYING PHOTO FRAME FACTORY | CN | CN | 52 | I | 20240920 | N | |||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205058060U | CN2016205058060U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种触动式吸盘装置 | 20150916 | 20160302 | 20160302 | 20160302 | 201520714965.7 | 205058060 | B25J15/06 | B25J15/06 | LANXI BAIYING PHOTO FRAME FACTORY | CN | CN | 52 | I | 20240920 | N | |||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205058060U | CN2016205058060U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种触动式吸盘装置 | 20150916 | 20160302 | 20160302 | 20160302 | 201520714965.7 | 205058060 | B25J15/06 | B25J15/06 | LANXI BAIYING PHOTO FRAME FACTORY | CN | CN | 52 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205111874U | CN2016205111874U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 双轴机械节段 | 20150930 | 20160330 | 20160330 | 20160330 | 201520763653.5 | 205111874 | B25J17/00 | B25J17/00 | 北京恒正精机科技 | 8 | I | 20240920 | N | |||||||||||||||||||||||||
| 44279 | 접속부(joint) | 3 | 로봇 공학 | 로봇의 구성 요소 | 접속부(joint) [B25J17/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205111874U | CN2016205111874U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 双轴机械节段 | 20150930 | 20160330 | 20160330 | 20160330 | 201520763653.5 | 205111874 | B25J17/00 | B25J17/00 | 北京恒正精机科技 | 8 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205111874U | CN2016205111874U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 双轴机械节段 | 20150930 | 20160330 | 20160330 | 20160330 | 201520763653.5 | 205111874 | B25J17/00 | B25J17/00 | 北京恒正精机科技 | 8 | I | 20240920 | N | ||||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166935U | CN2016205166935U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种平台机械手 | 20151103 | 20160420 | 20160420 | 20160420 | 201520865013.5 | 205166935 | B25J9/10 | B25J9/04 || B25J9/10 | FUJISAN INDUSTRIAL TECHNOLOGY OF SHENZHEN CITY | CN | CN | 18 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166935U | CN2016205166935U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种平台机械手 | 20151103 | 20160420 | 20160420 | 20160420 | 201520865013.5 | 205166935 | B25J9/10 | B25J9/04 || B25J9/10 | FUJISAN INDUSTRIAL TECHNOLOGY OF SHENZHEN CITY | CN | CN | 18 | I | 20240920 | N | ||||||||||||||||||||||
| 44162 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 | 3 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166935U | CN2016205166935U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种平台机械手 | 20151103 | 20160420 | 20160420 | 20160420 | 201520865013.5 | 205166935 | B25J9/10 | B25J9/04 || B25J9/10 | FUJISAN INDUSTRIAL TECHNOLOGY OF SHENZHEN CITY | CN | CN | 18 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166935U | CN2016205166935U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种平台机械手 | 20151103 | 20160420 | 20160420 | 20160420 | 201520865013.5 | 205166935 | B25J9/10 | B25J9/04 || B25J9/10 | FUJISAN INDUSTRIAL TECHNOLOGY OF SHENZHEN CITY | CN | CN | 18 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166954U | CN2016205166954U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种物料箱夹取装置 | 20151207 | 20160420 | 20160420 | 20160420 | 201521004219.5 | 205166954 | B25J15/08 | B25J15/08 | BOZHONG PRECISION INDUSTRY TECHNOLOGY | CN | CN | 1467 | I | 20240920 | N | |||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166954U | CN2016205166954U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种物料箱夹取装置 | 20151207 | 20160420 | 20160420 | 20160420 | 201521004219.5 | 205166954 | B25J15/08 | B25J15/08 | BOZHONG PRECISION INDUSTRY TECHNOLOGY | CN | CN | 1467 | I | 20240920 | N | |||||||||||||||||||||
| 44268 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 [B25J15/08_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166954U | CN2016205166954U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种物料箱夹取装置 | 20151207 | 20160420 | 20160420 | 20160420 | 201521004219.5 | 205166954 | B25J15/08 | B25J15/08 | BOZHONG PRECISION INDUSTRY TECHNOLOGY | CN | CN | 1467 | I | 20240920 | N | ||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205166954U | CN2016205166954U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种物料箱夹取装置 | 20151207 | 20160420 | 20160420 | 20160420 | 201521004219.5 | 205166954 | B25J15/08 | B25J15/08 | BOZHONG PRECISION INDUSTRY TECHNOLOGY | CN | CN | 1467 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205184777U | CN2016205184777U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种并联拖动示教机器人 | 20151217 | 20160427 | 20160427 | 20160427 | 201521064327.1 | 205184777 | B25J9/22 | B25J9/22 | FOSHAN XINPENG ROBOT TECHNOLOGY | CN | CN | 134 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205184777U | CN2016205184777U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种并联拖动示教机器人 | 20151217 | 20160427 | 20160427 | 20160427 | 201521064327.1 | 205184777 | B25J9/22 | B25J9/22 | FOSHAN XINPENG ROBOT TECHNOLOGY | CN | CN | 134 | I | 20240920 | N | ||||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205184777U | CN2016205184777U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种并联拖动示教机器人 | 20151217 | 20160427 | 20160427 | 20160427 | 201521064327.1 | 205184777 | B25J9/22 | B25J9/22 | FOSHAN XINPENG ROBOT TECHNOLOGY | CN | CN | 134 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205184777U | CN2016205184777U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种并联拖动示教机器人 | 20151217 | 20160427 | 20160427 | 20160427 | 201521064327.1 | 205184777 | B25J9/22 | B25J9/22 | FOSHAN XINPENG ROBOT TECHNOLOGY | CN | CN | 134 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415634U | CN2016205415634U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种变位夹取机构 | 20160318 | 20160803 | 20160803 | 20160803 | 201620209174.3 | 205415634 | B25J9/14 | B25J9/14 | 大连经济技术开发区日创自动化设备 | 大连经济技术开发区日创自动化设备 | CN | CN | 3 | I | 20240920 | N | ||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415634U | CN2016205415634U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种变位夹取机构 | 20160318 | 20160803 | 20160803 | 20160803 | 201620209174.3 | 205415634 | B25J9/14 | B25J9/14 | 大连经济技术开发区日创自动化设备 | 大连经济技术开发区日创自动化设备 | CN | CN | 3 | I | 20240920 | N | |||||||||||||||||||||
| 44162 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 | 3 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415634U | CN2016205415634U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种变位夹取机构 | 20160318 | 20160803 | 20160803 | 20160803 | 201620209174.3 | 205415634 | B25J9/14 | B25J9/14 | 大连经济技术开发区日创自动化设备 | 大连经济技术开发区日创自动化设备 | CN | CN | 3 | I | 20240920 | N | ||||||||||||||||||||
| 44179 | [프로그램 제어 메니플레이터] 유체에 의한 것 | 4 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | [프로그램 제어 메니플레이터] 유체에 의한 것 [B25J9/14_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415634U | CN2016205415634U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种变位夹取机构 | 20160318 | 20160803 | 20160803 | 20160803 | 201620209174.3 | 205415634 | B25J9/14 | B25J9/14 | 大连经济技术开发区日创自动化设备 | 大连经济技术开发区日创自动化设备 | CN | CN | 3 | I | 20240920 | N | |||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415634U | CN2016205415634U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种变位夹取机构 | 20160318 | 20160803 | 20160803 | 20160803 | 201620209174.3 | 205415634 | B25J9/14 | B25J9/14 | 大连经济技术开发区日创自动化设备 | 大连经济技术开发区日创自动化设备 | CN | CN | 3 | I | 20240920 | N | ||||||||||||||||||||
| 44254 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 서보 구동에 의한 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 서보 구동에 의한 것 [B25J15/02_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415659U | CN2016205415659U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 抓取机构、抓取装置及机器人 | 20160202 | 20160803 | 20160803 | 20160803 | 201620108249.9 | 205415659 | B25J15/02 | B25J15/02 | Shenzhen Yuejiang Technology | CN | CN | 396 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415659U | CN2016205415659U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 抓取机构、抓取装置及机器人 | 20160202 | 20160803 | 20160803 | 20160803 | 201620108249.9 | 205415659 | B25J15/02 | B25J15/02 | Shenzhen Yuejiang Technology | CN | CN | 396 | I | 20240920 | N | |||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415659U | CN2016205415659U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 抓取机构、抓取装置及机器人 | 20160202 | 20160803 | 20160803 | 20160803 | 201620108249.9 | 205415659 | B25J15/02 | B25J15/02 | Shenzhen Yuejiang Technology | CN | CN | 396 | I | 20240920 | N | |||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205415659U | CN2016205415659U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 抓取机构、抓取装置及机器人 | 20160202 | 20160803 | 20160803 | 20160803 | 201620108249.9 | 205415659 | B25J15/02 | B25J15/02 | Shenzhen Yuejiang Technology | CN | CN | 396 | I | 20240920 | N | ||||||||||||||||||||||
| 44241 | 마이크로 메니플레이터 | 3 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 마이크로 메니플레이터 [B25J7/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205466158U | CN2016205466158U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种微颗粒的取放装置 | 20160329 | 20160817 | 20160817 | 20160817 | 201620245678.0 | 205466158 | B25J7/00 | B25J7/00 | LASER FUSION RESEARCH CENTER CHINA ACADEMY OF ENGINEERING PHYSICS | CN | CN | 2115 | I | 20240920 | N | |||||||||||||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205466158U | CN2016205466158U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种微颗粒的取放装置 | 20160329 | 20160817 | 20160817 | 20160817 | 201620245678.0 | 205466158 | B25J7/00 | B25J7/00 | LASER FUSION RESEARCH CENTER CHINA ACADEMY OF ENGINEERING PHYSICS | CN | CN | 2115 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205466158U | CN2016205466158U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种微颗粒的取放装置 | 20160329 | 20160817 | 20160817 | 20160817 | 201620245678.0 | 205466158 | B25J7/00 | B25J7/00 | LASER FUSION RESEARCH CENTER CHINA ACADEMY OF ENGINEERING PHYSICS | CN | CN | 2115 | I | 20240920 | N | |||||||||||||||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521352U | CN2016205521352U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 移动机器人 | 20160203 | 20160831 | 20160831 | 20160831 | 201620106195.2 | 205521352 | B25J5/00 | B25J5/00 | 智瑾 | 智瑾 | CN | CN | 1 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521352U | CN2016205521352U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 移动机器人 | 20160203 | 20160831 | 20160831 | 20160831 | 201620106195.2 | 205521352 | B25J5/00 | B25J5/00 | 智瑾 | 智瑾 | CN | CN | 1 | I | 20240920 | N | ||||||||||||||||||||||
| 44244 | 차 또는 휠에 설치되어 있는 메니플레이터 | 3 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 차 또는 휠에 설치되어 있는 메니플레이터 [B25J5/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521352U | CN2016205521352U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 移动机器人 | 20160203 | 20160831 | 20160831 | 20160831 | 201620106195.2 | 205521352 | B25J5/00 | B25J5/00 | 智瑾 | 智瑾 | CN | CN | 1 | I | 20240920 | N | ||||||||||||||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521496U | CN2016205521496U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种便于拆卸安装的舵机壳体 | 20160120 | 20160831 | 20160831 | 20160831 | 201620054933.3 | 205521496 | B25J19/00 | B25J19/00 | 冷晓琨 || 哈尔滨乐聚智能科技有限公司 | CN | CN | 6 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521496U | CN2016205521496U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种便于拆卸安装的舵机壳体 | 20160120 | 20160831 | 20160831 | 20160831 | 201620054933.3 | 205521496 | B25J19/00 | B25J19/00 | 冷晓琨 || 哈尔滨乐聚智能科技有限公司 | CN | CN | 6 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205521496U | CN2016205521496U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种便于拆卸安装的舵机壳体 | 20160120 | 20160831 | 20160831 | 20160831 | 201620054933.3 | 205521496 | B25J19/00 | B25J19/00 | 冷晓琨 || 哈尔滨乐聚智能科技有限公司 | CN | CN | 6 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205572462U | CN2016205572462U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 水下通用液压仿生机械手 | 20160427 | 20160914 | 20160914 | 20160914 | 201620365591.7 | 205572462 | B25J15/10 | B25J15/00 || B25J15/10 | Zhou Jie | Zhou Jie | CN | CN | 296 | I | 20240920 | N | ||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205572462U | CN2016205572462U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 水下通用液压仿生机械手 | 20160427 | 20160914 | 20160914 | 20160914 | 201620365591.7 | 205572462 | B25J15/10 | B25J15/00 || B25J15/10 | Zhou Jie | Zhou Jie | CN | CN | 296 | I | 20240920 | N | ||||||||||||||||||||
| 44268 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 [B25J15/08_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205572462U | CN2016205572462U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 水下通用液压仿生机械手 | 20160427 | 20160914 | 20160914 | 20160914 | 201620365591.7 | 205572462 | B25J15/10 | B25J15/00 || B25J15/10 | Zhou Jie | Zhou Jie | CN | CN | 296 | I | 20240920 | N | |||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205572462U | CN2016205572462U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 水下通用液压仿生机械手 | 20160427 | 20160914 | 20160914 | 20160914 | 201620365591.7 | 205572462 | B25J15/10 | B25J15/00 || B25J15/10 | Zhou Jie | Zhou Jie | CN | CN | 296 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205660709U | CN2016205660709U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种用于全自动焊锡机上的取料机械手 | 20160519 | 20161026 | 20161026 | 20161026 | 201620460976.1 | 205660709 | B25J9/00 | B23K3/08 || B25J9/00 | Hefei Yanli Electronic Technology | CN | CN | 63 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205660709U | CN2016205660709U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种用于全自动焊锡机上的取料机械手 | 20160519 | 20161026 | 20161026 | 20161026 | 201620460976.1 | 205660709 | B25J9/00 | B23K3/08 || B25J9/00 | Hefei Yanli Electronic Technology | CN | CN | 63 | I | 20240920 | N | ||||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2016205660709U | CN2016205660709U | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种用于全自动焊锡机上的取料机械手 | 20160519 | 20161026 | 20161026 | 20161026 | 201620460976.1 | 205660709 | B25J9/00 | B23K3/08 || B25J9/00 | Hefei Yanli Electronic Technology | CN | CN | 63 | I | 20240920 | N | |||||||||||||||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017104786231B | CN2017104786231B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 内置非完整球面约束结构 | 20150324 | 20150722 | 20170111 | 20150722 | 20170111 | 201510129395.X | 104786231 | 104786231 | B25J19/00 | B25J17/00 || B25J19/00 | B25J17/00 | B25J17/00 || B25J19/00 | Shanghai University | CN | CN | 11202 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017104786231B | CN2017104786231B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 内置非完整球面约束结构 | 20150324 | 20150722 | 20170111 | 20150722 | 20170111 | 201510129395.X | 104786231 | 104786231 | B25J19/00 | B25J17/00 || B25J19/00 | B25J17/00 | B25J17/00 || B25J19/00 | Shanghai University | CN | CN | 11202 | I | 20240920 | N | |||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017104786231B | CN2017104786231B | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 内置非完整球面约束结构 | 20150324 | 20150722 | 20170111 | 20150722 | 20170111 | 201510129395.X | 104786231 | 104786231 | B25J19/00 | B25J17/00 || B25J19/00 | B25J17/00 | B25J17/00 || B25J19/00 | Shanghai University | CN | CN | 11202 | I | 20240920 | N | ||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106695794A | CN2017106695794A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种基于表面肌电信号的移动机器臂系统及其控制方法 | 20170220 | 20170524 | 20170524 | 20170524 | 201710089888.4 | 106695794 | B25J9/1602 | B25J13/006 || B25J9/1602 || B25J9/1689 | B25J9/16 | B25J13/00 || B25J9/16 | SUZHOU CHENBEN INTELLIGENT TECHNOLOGY | CN | CN | 30 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106695794A | CN2017106695794A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种基于表面肌电信号的移动机器臂系统及其控制方法 | 20170220 | 20170524 | 20170524 | 20170524 | 201710089888.4 | 106695794 | B25J9/1602 | B25J13/006 || B25J9/1602 || B25J9/1689 | B25J9/16 | B25J13/00 || B25J9/16 | SUZHOU CHENBEN INTELLIGENT TECHNOLOGY | CN | CN | 30 | I | 20240920 | N | ||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106695794A | CN2017106695794A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种基于表面肌电信号的移动机器臂系统及其控制方法 | 20170220 | 20170524 | 20170524 | 20170524 | 201710089888.4 | 106695794 | B25J9/1602 | B25J13/006 || B25J9/1602 || B25J9/1689 | B25J9/16 | B25J13/00 || B25J9/16 | SUZHOU CHENBEN INTELLIGENT TECHNOLOGY | CN | CN | 30 | I | 20240920 | N | |||||||||||||||||||
| 44184 | [프로그램 제어] 제어 시스템 | 구조 | 건설에 특징이 있는 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | [프로그램 제어] 제어 시스템 | 구조 | 건설에 특징이 있는 것 [B25J9/1602_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106695794A | CN2017106695794A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种基于表面肌电信号的移动机器臂系统及其控制方法 | 20170220 | 20170524 | 20170524 | 20170524 | 201710089888.4 | 106695794 | B25J9/1602 | B25J13/006 || B25J9/1602 || B25J9/1689 | B25J9/16 | B25J13/00 || B25J9/16 | SUZHOU CHENBEN INTELLIGENT TECHNOLOGY | CN | CN | 30 | I | 20240920 | N | ||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106695794A | CN2017106695794A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种基于表面肌电信号的移动机器臂系统及其控制方法 | 20170220 | 20170524 | 20170524 | 20170524 | 201710089888.4 | 106695794 | B25J9/1602 | B25J13/006 || B25J9/1602 || B25J9/1689 | B25J9/16 | B25J13/00 || B25J9/16 | SUZHOU CHENBEN INTELLIGENT TECHNOLOGY | CN | CN | 30 | I | 20240920 | N | |||||||||||||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://patentinfo.patentpia.com/biblio/CN/CN/CN2017106826873A | CN2017106826873A | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 一种输电线路巡检机器人视觉伺服抓线控制方法 | 20151203 | 20170613 | 20170613 | 20170613 | 201510883101.2 | 106826873 | B25J13/00 | B25J13/00 | B25J13/00 | B25J13/00 | GUANGZHOU POWER SUPPLY || SHENYANG INSTITUTE OF AUTOMATION CHINESE ACADEMY OF SCIENCES | GUANGZHOU POWER SUPPLY || SHENYANG INSTITUTE OF AUTOMATION CHINESE ACADEMY OF SCIENCES | CN | CN | 3508 | I | 20240920 | N |
| 판매제공처 홈페이지 | www.patentpia.com | 라이선스 | Creative Commons Attribution |
|---|---|---|---|
| 판매 담당자 | 광개토연구소 | 권한 | Copyright 2021. PatentPia Inc. All Right Reserved |
| 연락처 | 02-569-7503 | 접근 권한 | public |
| 이메일 | kgt@patentpia.com | 상품 구분 | dataset |
| 품질측정 검사 | 품질측정기간 | ~ | |
|---|---|---|---|
| 품질측정기관 | 광개토연구소 | 품질측정연락정보 | 025697503 |
| 품질측정결과 | 품질측정내용 |
현재 준비중입니다.
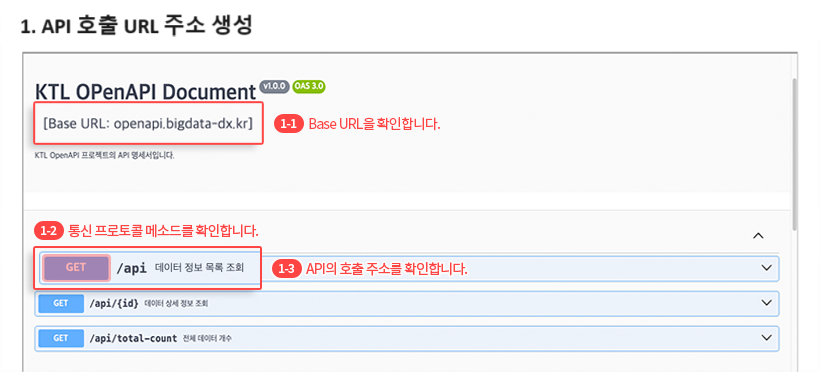
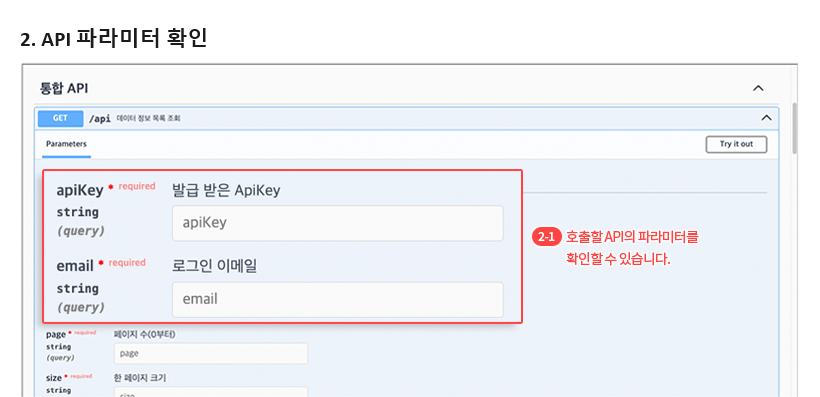
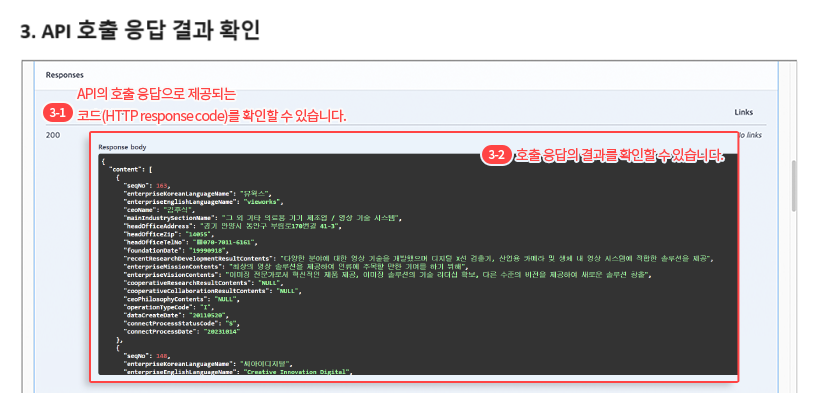
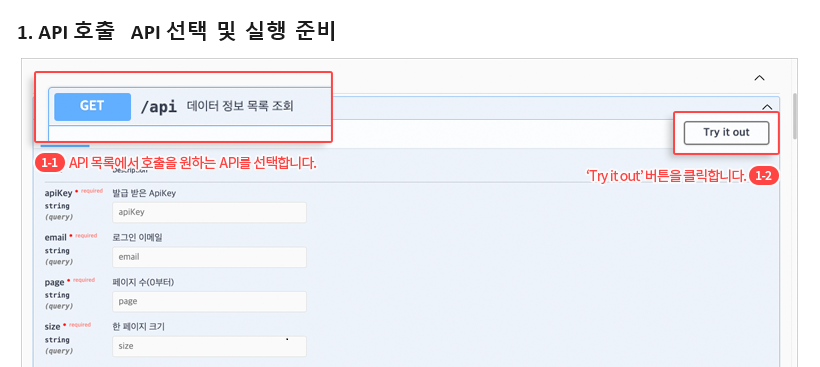
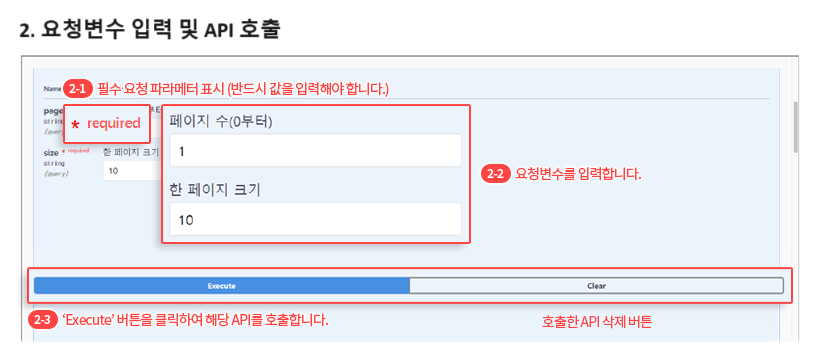
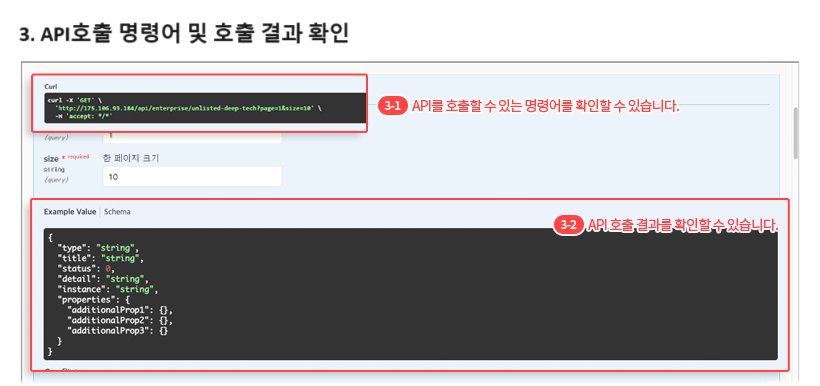




10047 경기도 김포시 양촌읍 황금1로 122,김포제조융합혁신센터 3층 한국산업기술시험원 ㅣ 사업자번호 : 113-82-06228 ㅣ 대표자명 : 김세종 ㅣ TEL: 02-860-1059 ㅣ E-mail: bigdata.dx@ktl.re.kr
Copyright ⓒ 2021 KOREA ENTERPRISE DATA. All Rights Reserved.