
가격협의 상품 및 유료상품의 구매를 원하실 경우 맞춤형 데이터 신청란에 글을 남겨주시면
신속히 답변드리도록 하겠습니다.




| 데이터 제공 포맷 | 데이터 제공 방식 | 데이터 파일 용량 |
|---|---|---|
| csv/zip | 다운로드 | 28.46 MB |
₩22,260,000
| 데이터셋명 | 로봇공학 기술분야 글로벌 특허 보유 기업 분석 데이터 | 데이터 유형 | csv/zip |
|---|---|---|---|
| 데이터 분야 | 특허 | 구축 데이터량 | 28.46 MB |
| 구축기관 | 광개토연구소 | 데이터 갱신 일자 | 2024-09-20 |
| 데이터 개방 일자 | 2021-09-16 | 데이터 이용 기한 | 무기한 |
| 데이터 갱신 주기 | - | 버전 | 1.0 |
| 주요 키워드 | 로봇공학, 특허, 특허동향, 시계열, 기업 | ||
| 벨류체인 키워드 | 기술획득 | ||
| 소개 | 로봇공학 기술분야 글로벌 특허 보유 기업 분석 데이터 | ||
■ 기간 및 범위
- 기간 범위: 최근 11년 (2012~2022) / 국가 범위: 미국,한국,중국,일본,유럽
■ 활용 예제
- 본 데이터 상품을 활용하여 사용자는 다음과 같은 정보를 확인할 수 있습니다.
(상세한 활용 예제는 상품 정보 중 '데이터 활용사례' 탭을 클릭해주세요.)
1) 기술분야 계층 구조
2) 기술 키워드 국문
3) 국가 코드
4) 분석콘텐츠URL
5) 권리자ID, 명칭, 사업자등록번호, 법인등록번호
6) 권리자 국적코드, NPE여부
7) 권리자 보유등록특허수, 출원공개특허수
8) 핵심/선도/급성장/전문기업 및 대학연구기관 순위
9) 특허 공개/등록량
10) 국가 R&D 특허 공개량
11) 평균 등록 소요 기간
12) 등록률, 독립항 권리 범위 유지율, 청구항수 유지율, 집중률, 점유율
13) 특허당 청구항 수
14) 소송/심판 집계 정보
15) 특허 거래 집계 정보(M&A 포함)
16) 인용/피인용 집계 정보
17) 특허 패밀리 집계 정보
| TCHNL_RELM_ID | TCHNL_RELM_NM | TCHNL_RELM_DEPT_CD | TCHNL_RELM_DEPT_1_NM | TCHNL_RELM_DEPT_2_NM | TCHNL_RELM_DEPT_3_NM | TCHNL_RELM_DEPT_4_NM | NTN_CD | ANLSS_CNCNS_URL | RGPRS_ID | RGPRS_NM | BSNSM_RGNO | CRPRT_RGNO | RGPRS_NTNLT_CD | RGPRS_NPE_YN | RGPRS_HOLD_RGSTN_PTCNT | RGPRS_APPLC_OTTPB_PTCNT | CORE_ENTRP_RANK | LDR_ENTRP_RANK | RPGRW_ENTRP_RANK | SPCLI_ENTRP_RANK | UNVRS_RSINS_RANK | AL_PTNT_OPQNT | THYR_PTNT_OPQNT | YR1_BFR_PTNT_OPQNT | YR2_BFR_PTNT_OPQNT | YR3_BFR_PTNT_OPQNT | YR4_BFR_PTNT_OPQNT | YR5_BFR_PTNT_OPQNT | YR6_BFR_PTNT_OPQNT | YR7_BFR_PTNT_OPQNT | YR8_BFR_PTNT_OPQNT | YR9_BFR_PTNT_OPQNT | YR10_BFR_PTNT_OPQNT | AL_PTNT_RGQNT | THYR_PTNT_RGQNT | YR1_BFR_PTNT_RGQNT | YR2_BFR_PTNT_RGQNT | YR3_BFR_PTNT_RGQNT | YR4_BFR_PTNT_RGQNT | YR5_BFR_PTNT_RGQNT | YR6_BFR_PTNT_RGQNT | YR7_BFR_PTNT_RGQNT | YR8_BFR_PTNT_RGQNT | YR9_BFR_PTNT_RGQNT | YR10_BFR_PTNT_RGQNT | AL_RGRT | AL_AVRG_RGSTN_NCPRD | AL_INCLM_RGSCP_MNRT | AL_CLCNT_MNRT | AL_NTTSK_PTNT_OPQNT | AL_PTPR_CLCNT | THYR_PTPR_CLCNT | YR1_BFR_PTPR_CLCNT | YR2_BFR_PTPR_CLCNT | YR3_BFR_PTPR_CLCNT | YR4_BFR_PTPR_CLCNT | YR5_BFR_PTPR_CLCNT | YR6_BFR_PTPR_CLCNT | YR7_BFR_PTPR_CLCNT | YR8_BFR_PTPR_CLCNT | YR9_BFR_PTPR_CLCNT | YR10_BFR_PTPR_CLCNT | AL_PTNT_LWS_CNT | THYR_PTNT_LWS_CNT | YR1_BFR_PTNT_LWS_CNT | YR2_BFR_PTNT_LWS_CNT | YR3_BFR_PTNT_LWS_CNT | YR4_BFR_PTNT_LWS_CNT | YR5_BFR_PTNT_LWS_CNT | YR6_BFR_PTNT_LWS_CNT | YR7_BFR_PTNT_LWS_CNT | YR8_BFR_PTNT_LWS_CNT | YR9_BFR_PTNT_LWS_CNT | YR10_BFR_PTNT_LWS_CNT | AL_LWS_USE_PTCNT | THYR_LWS_USE_PTCNT | YR1_BFR_LWS_USE_PTCNT | YR2_BFR_LWS_USE_PTCNT | YR3_BFR_LWS_USE_PTCNT | YR4_BFR_LWS_USE_PTCNT | YR5_BFR_LWS_USE_PTCNT | YR6_BFR_LWS_USE_PTCNT | YR7_BFR_LWS_USE_PTCNT | YR8_BFR_LWS_USE_PTCNT | YR9_BFR_LWS_USE_PTCNT | YR10_BFR_LWS_USE_PTCNT | AL_PTNT_RFRNG_CNT | THYR_PTNT_RFRNG_CNT | YR1_BFR_PTNT_RFRNG_CNT | YR2_BFR_PTNT_RFRNG_CNT | YR3_BFR_PTNT_RFRNG_CNT | YR4_BFR_PTNT_RFRNG_CNT | YR5_BFR_PTNT_RFRNG_CNT | YR6_BFR_PTNT_RFRNG_CNT | YR7_BFR_PTNT_RFRNG_CNT | YR8_BFR_PTNT_RFRNG_CNT | YR9_BFR_PTNT_RFRNG_CNT | YR10_BFR_PTNT_RFRNG_CNT | AL_RFRNG_USE_PTCNT | THYR_RFRNG_USE_PTCNT | YR1_BFR_RFRNG_USE_PTCNT | YR2_BFR_RFRNG_USE_PTCNT | YR3_BFR_RFRNG_USE_PTCNT | YR4_BFR_RFRNG_USE_PTCNT | YR5_BFR_RFRNG_USE_PTCNT | YR6_BFR_RFRNG_USE_PTCNT | YR7_BFR_RFRNG_USE_PTCNT | YR8_BFR_RFRNG_USE_PTCNT | YR9_BFR_RFRNG_USE_PTCNT | YR10_BFR_RFRNG_USE_PTCNT | AL_DLNGS_PTCNT | THYR_DLNGS_PTCNT | YR1_BFR_DLNGS_PTCNT | YR2_BFR_DLNGS_PTCNT | YR3_BFR_DLNGS_PTCNT | YR4_BFR_DLNGS_PTCNT | YR5_BFR_DLNGS_PTCNT | YR6_BFR_DLNGS_PTCNT | YR7_BFR_DLNGS_PTCNT | YR8_BFR_DLNGS_PTCNT | YR9_BFR_DLNGS_PTCNT | YR10_BFR_DLNGS_PTCNT | AL_UNMRG_RLDLN_PTCNT | THYR_UNMRG_RLDLN_PTCNT | YR1_BFR_UNMRG_RLDLN_PTCNT | YR2_BFR_UNMRG_RLDLN_PTCNT | YR3_BFR_UNMRG_RLDLN_PTCNT | YR4_BFR_UNMRG_RLDLN_PTCNT | YR5_BFR_UNMRG_RLDLN_PTCNT | YR6_BFR_UNMRG_RLDLN_PTCNT | YR7_BFR_UNMRG_RLDLN_PTCNT | YR8_BFR_UNMRG_RLDLN_PTCNT | YR9_BFR_UNMRG_RLDLN_PTCNT | YR10_BFR_UNMRG_RLDLN_PTCNT | AL_JUDGE_CTCNT | THYR_JUDGE_CTCNT | YR1_BFR_JUDGE_CTCNT | YR2_BFR_JUDGE_CTCNT | YR3_BFR_JUDGE_CTCNT | YR4_BFR_JUDGE_CTCNT | YR5_BFR_JUDGE_CTCNT | YR6_BFR_JUDGE_CTCNT | YR7_BFR_JUDGE_CTCNT | YR8_BFR_JUDGE_CTCNT | YR9_BFR_JUDGE_CTCNT | YR10_BFR_JUDGE_CTCNT | AL_OVJDG_CTCNT | THYR_OVJDG_CTCNT | YR1_BFR_OVJDG_CTCNT | YR2_BFR_OVJDG_CTCNT | YR3_BFR_OVJDG_CTCNT | YR4_BFR_OVJDG_CTCNT | YR5_BFR_OVJDG_CTCNT | YR6_BFR_OVJDG_CTCNT | YR7_BFR_OVJDG_CTCNT | YR8_BFR_OVJDG_CTCNT | YR9_BFR_OVJDG_CTCNT | YR10_BFR_OVJDG_CTCNT | AL_MGNTC_CTCNT | THYR_MGNTC_CTCNT | YR1_BFR_MGNTC_CTCNT | YR2_BFR_MGNTC_CTCNT | YR3_BFR_MGNTC_CTCNT | YR4_BFR_MGNTC_CTCNT | YR5_BFR_MGNTC_CTCNT | YR6_BFR_MGNTC_CTCNT | YR7_BFR_MGNTC_CTCNT | YR8_BFR_MGNTC_CTCNT | YR9_BFR_MGNTC_CTCNT | YR10_BFR_MGNTC_CTCNT | AL_PTPR_JUDGE_CTCNT | THYR_PTPR_JUDGE_CTCNT | YR1_BFR_PTPR_JUDGE_CTCNT | YR2_BFR_PTPR_JUDGE_CTCNT | YR3_BFR_PTPR_JUDGE_CTCNT | YR4_BFR_PTPR_JUDGE_CTCNT | YR5_BFR_PTPR_JUDGE_CTCNT | YR6_BFR_PTPR_JUDGE_CTCNT | YR7_BFR_PTPR_JUDGE_CTCNT | YR8_BFR_PTPR_JUDGE_CTCNT | YR9_BFR_PTPR_JUDGE_CTCNT | YR10_BFR_PTPR_JUDGE_CTCNT | AL_PTPR_OVJDG_CTCNT | THYR_PTPR_OVJDG_CTCNT | YR1_BFR_PTPR_OVJDG_CTCNT | YR2_BFR_PTPR_OVJDG_CTCNT | YR3_BFR_PTPR_OVJDG_CTCNT | YR4_BFR_PTPR_OVJDG_CTCNT | YR5_BFR_PTPR_OVJDG_CTCNT | YR6_BFR_PTPR_OVJDG_CTCNT | YR7_BFR_PTPR_OVJDG_CTCNT | YR8_BFR_PTPR_OVJDG_CTCNT | YR9_BFR_PTPR_OVJDG_CTCNT | YR10_BFR_PTPR_OVJDG_CTCNT | AL_PTPR_MGNTC_CTCNT | THYR_PTPR_MGNTC_CTCNT | YR1_BFR_PTPR_MGNTC_CTCNT | YR2_BFR_PTPR_MGNTC_CTCNT | YR3_BFR_PTPR_MGNTC_CTCNT | YR4_BFR_PTPR_MGNTC_CTCNT | YR5_BFR_PTPR_MGNTC_CTCNT | YR6_BFR_PTPR_MGNTC_CTCNT | YR7_BFR_PTPR_MGNTC_CTCNT | YR8_BFR_PTPR_MGNTC_CTCNT | YR9_BFR_PTPR_MGNTC_CTCNT | YR10_BFR_PTPR_MGNTC_CTCNT | AL_PTPR_OVRSS_FMCNT | THYR_PTPR_OVRSS_FMCNT | YR1_BFR_PTPR_OVRSS_FMCNT | YR2_BFR_PTPR_OVRSS_FMCNT | YR3_BFR_PTPR_OVRSS_FMCNT | YR4_BFR_PTPR_OVRSS_FMCNT | YR5_BFR_PTPR_OVRSS_FMCNT | YR6_BFR_PTPR_OVRSS_FMCNT | YR7_BFR_PTPR_OVRSS_FMCNT | YR8_BFR_PTPR_OVRSS_FMCNT | YR9_BFR_PTPR_OVRSS_FMCNT | YR10_BFR_PTPR_OVRSS_FMCNT | AL_TCINS_JUDGE_CTTN_PSRT | AL_TCINS_OVJDG_CTTN_PSRT | AL_OVRSS_FMCNT | THYR_OVRSS_FMCNT | YR1_BFR_OVRSS_FMCNT | YR2_BFR_OVRSS_FMCNT | YR3_BFR_OVRSS_FMCNT | YR4_BFR_OVRSS_FMCNT | YR5_BFR_OVRSS_FMCNT | YR6_BFR_OVRSS_FMCNT | YR7_BFR_OVRSS_FMCNT | YR8_BFR_OVRSS_FMCNT | YR9_BFR_OVRSS_FMCNT | YR10_BFR_OVRSS_FMCNT | AL_TCHNL_CNERT | AL_PSRT | TCINS_APPLC_AL_PSRT | opert_sctin_cd | data_crtin_dt | cntct_prces_stts_cd | cntct_prces_dt |
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000255345 | 广州蓝海机器人系统 | CN | 35 | 41 | 9 | 0 | 0 | 0 | 0 | 0 | 1 | 4 | 4 | 0 | 0 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 2 | 4 | 2 | 0 | 0 | 0 | 1.0 | 9.625 | 0 | 3 | 3 | 4 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.2195122 | 6.990128E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000524785 | 无锡市盛宝嘉科技 | CN | 48 | 58 | 267 | 907 | 15 | 0 | 0 | 0 | 2 | 0 | 2 | 2 | 9 | 0 | 0 | 0 | 13 | 0 | 0 | 0 | 2 | 1 | 1 | 0 | 9 | 0 | 0 | 0 | 1.0 | 7.642857142857143 | 0 | 4 | 7 | 2 | 8 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.25862068 | 2.258152E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000524785 | 无锡市盛宝嘉科技 | CN | 48 | 58 | 326 | 26 | 0 | 0 | 0 | 2 | 0 | 2 | 4 | 18 | 0 | 0 | 0 | 22 | 0 | 0 | 0 | 2 | 1 | 1 | 0 | 18 | 0 | 0 | 0 | 1.0 | 6.576923076923077 | 0 | 3 | 7 | 2 | 8 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.44827586 | 2.0193704E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000579157 | 刘娴 | CN | 13 | 48 | 4 | 0 | 0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.083333336 | 3.1067237E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000693871 | 深圳市创客工场科技 | CN | 90 | 111 | 5 | 0 | 0 | 1 | 0 | 2 | 0 | 1 | 1 | 0 | 0 | 0 | 5 | 0 | 0 | 1 | 0 | 3 | 0 | 0 | 1 | 0 | 0 | 0 | 1.0 | 16.8 | 0 | 10 | 12 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.045045044 | 7.527173E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000693871 | 深圳市创客工场科技 | CN | 90 | 111 | 614 | 16 | 0 | 0 | 2 | 2 | 6 | 2 | 2 | 1 | 1 | 0 | 0 | 12 | 0 | 0 | 1 | 1 | 6 | 1 | 1 | 1 | 1 | 0 | 0 | 1.0 | 17.76923076923077 | 0 | 9 | 11 | 9 | 10 | 10 | 4 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0.14414415 | 1.2426895E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000693871 | 深圳市创客工场科技 | CN | 90 | 111 | 365 | 830 | 10 | 0 | 0 | 1 | 1 | 4 | 2 | 1 | 0 | 1 | 0 | 0 | 6 | 0 | 0 | 0 | 0 | 3 | 1 | 1 | 0 | 1 | 0 | 0 | 1.0 | 13.142857142857142 | 0 | 9 | 10 | 10 | 10 | 10 | 4 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.09009009 | 2.0485086E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000000693871 | 深圳市创客工场科技 | CN | 90 | 111 | 370 | 9 | 0 | 0 | 1 | 1 | 4 | 2 | 0 | 0 | 1 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 1.0 | 13.666666666666666 | 0 | 10 | 10 | 10 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08108108 | 2.0154518E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | KCN000000000693871 | 深圳市创客工场科技 | CN | 90 | 111 | 432 | 206 | 219 | 3 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 7.0 | 0 | 10 | 10 | 10 | 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.027027028 | 1.9752436E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001347564 | 天津联创金石自动化科技 | CN | 18 | 18 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 1.0 | 7.4 | 0 | 5 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.2777778 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000001347564 | 天津联创金石自动化科技 | CN | 18 | 18 | 812 | 359 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 1.0 | 7.4 | 0 | 5 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.2777778 | 1.0242543E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000001347564 | 天津联创金石自动化科技 | CN | 18 | 18 | 303 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 2 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 1.0 | 7.4 | 0 | 5 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.2777778 | 1.11969544E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44253&VERSION=2 | KCN000000001645904 | 上海原能细胞生物低温设备 | CN | 135 | 175 | 286 | 468 | 6 | 0 | 0 | 0 | 2 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 2 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.2 | 0 | 9 | 10 | 11 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.034285713 | 2.3664905E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000001645904 | 上海原能细胞生物低温设备 | CN | 135 | 175 | 654 | 8 | 0 | 0 | 0 | 2 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 7 | 0 | 0 | 0 | 2 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 8 | 10 | 9 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.045714285 | 1.2043477E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001645904 | 上海原能细胞生物低温设备 | CN | 135 | 175 | 9 | 0 | 0 | 0 | 3 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 8 | 0 | 0 | 0 | 3 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.88888888888889 | 0 | 7 | 7 | 9 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.05142857 | 6.990128E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001992182 | 克诺 | HK | 8 | 9 | 3 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.0 | 0 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.33333334 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000001992182 | 克诺 | HK | 8 | 9 | 297 | 3 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.0 | 0 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.33333334 | 6.145526E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000001992182 | 克诺 | HK | 8 | 9 | 239 | 3 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.0 | 0 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.33333334 | 6.7181725E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 5 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08928572 | 7.527173E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 369 | 838 | 371 | 5 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08928572 | 2.5322867E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 989 | 11 | 0 | 0 | 0 | 0 | 2 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 8 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.19642857 | 8.5434905E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 858 | 834 | 5 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 8 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08928572 | 1.0242543E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 5 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 8 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08928572 | 1.11969544E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | KCN000000002882992 | 深圳威琳懋生物科技 | CN | 0 | 56 | 226 | 337 | 101 | 5 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 8 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08928572 | 3.2920728E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 161 | 52 | 214 | 5 | 0 | 0 | 1 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 12.0 | 0 | 11 | 8 | 11 | 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 4 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08064516 | 4.2258282E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 224 | 16 | 838 | 17 | 0 | 0 | 5 | 9 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 14 | 0 | 0 | 5 | 7 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 19.27777777777778 | 0 | 11 | 8 | 11 | 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 14 | 0 | 0 | 0 | 13 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0.27419356 | 2.559239E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 123 | 18 | 262 | 10 | 0 | 0 | 3 | 6 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 8 | 0 | 0 | 3 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 22.3 | 0 | 11 | 8 | 11 | 20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 10 | 0 | 0 | 0 | 9 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0.16129032 | 5.0645735E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 405 | 37 | 22 | 0 | 0 | 7 | 11 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 19 | 0 | 0 | 7 | 9 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 19.88888888888889 | 0 | 11 | 8 | 11 | 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 14 | 0 | 0 | 0 | 13 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0.3548387 | 1.7086981E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 860 | 200 | 871 | 5 | 0 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 21.11111111111111 | 0 | 10 | 8 | 12 | 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.08064516 | 1.0242543E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000006744473 | 达闼科技 | CN | 44 | 62 | 299 | 4 | 0 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 20.875 | 0 | 10 | 8 | 12 | 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.06451613 | 8.957564E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000007792821 | 江苏电子信息职业学院 | CN | 96 | 173 | 731 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 14.2 | 0 | 4 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.01734104 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000009462175 | 太仓市恒奇机械设备 | CN | 14 | 14 | 236 | 655 | 5 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 10.6 | 0 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.35714287 | 7.527173E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000009462175 | 太仓市恒奇机械设备 | CN | 14 | 14 | 700 | 217 | 219 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 12.333333333333334 | 0 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.21428572 | 1.519372E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009462175 | 太仓市恒奇机械设备 | CN | 14 | 14 | 165 | 784 | 8 | 0 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 8 | 0 | 0 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.625 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5714286 | 6.213447E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000009462175 | 太仓市恒奇机械设备 | CN | 14 | 14 | 350 | 467 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.333333333333334 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.21428572 | 6.145526E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000009462175 | 太仓市恒奇机械设备 | CN | 14 | 14 | 315 | 401 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.333333333333334 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.21428572 | 6.7181725E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | KCN000000009617767 | 北京六部工坊科技 | CN | 10 | 10 | 193 | 26 | 19 | 4 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 5.5 | 0 | 6 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4 | 3.6281178E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000009617767 | 北京六部工坊科技 | CN | 10 | 10 | 849 | 791 | 3 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 5.333333333333333 | 0 | 6 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.3 | 4.516304E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009617767 | 北京六部工坊科技 | CN | 10 | 10 | 110 | 180 | 9 | 0 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 5.111111111111111 | 0 | 6 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.9 | 6.990128E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44244 | 차 또는 휠에 설치되어 있는 메니플레이터 | 3 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 차 또는 휠에 설치되어 있는 메니플레이터 [B25J5/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44244&VERSION=2 | KCN000000009617767 | 北京六部工坊科技 | CN | 10 | 10 | 22 | 16 | 4 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 5.5 | 0 | 6 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.4 | 4.669079E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009682134 | 中科合肥智慧农业协同创新研究院 | CN | 20 | 73 | 709 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 3.0 | 0 | 7 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.04109589 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 796 | 57 | 7 | 0 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 6.0 | 0 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.088607594 | 1.0538042E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 522 | 67 | 463 | 4 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.050632913 | 2.0258293E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 727 | 21 | 14 | 0 | 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 6.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.17721519 | 1.0873533E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 594 | 30 | 836 | 7 | 0 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.088607594 | 1.433956E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 27 | 7 | 0 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.088607594 | 1.5675736E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | KCN000000009688611 | 上海景吾酷租科技发展 | CN | 15 | 79 | 192 | 23 | 118 | 6 | 0 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.07594936 | 3.9504873E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009807054 | 上海桐阜机械设备 | CN | 14 | 14 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 4.0 | 0 | 7 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.21428572 | 2.3300428E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000002680 | 上海海事大学 | CN | 1228 | 3195 | 526 | 219 | 8 | 0 | 0 | 0 | 0 | 3 | 1 | 1 | 1 | 0 | 1 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1.0 | 12.857142857142858 | 0.875 | 0 | 5 | 4 | 5 | 10 | 6 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0025039124 | 1.638807E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000002680 | 上海海事大学 | CN | 1228 | 3195 | 502 | 199 | 10 | 0 | 0 | 3 | 1 | 0 | 0 | 4 | 1 | 0 | 0 | 1 | 5 | 0 | 0 | 2 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 12.181818181818182 | 0 | 6 | 6 | 5 | 3 | 7 | 10 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0031298904 | 1.5054346E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000002680 | 上海海事大学 | CN | 1228 | 3195 | 522 | 220 | 19 | 0 | 0 | 3 | 2 | 3 | 1 | 5 | 2 | 0 | 1 | 1 | 8 | 0 | 0 | 2 | 1 | 1 | 0 | 2 | 1 | 0 | 1 | 0 | 1.0 | 12.5 | 0.875 | 0 | 5 | 6 | 5 | 4 | 5 | 8 | 8 | 7 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0059467917 | 1.4756937E-4 | 0.0 | I | 20240920 | N | ||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000000002680 | 上海海事大学 | CN | 1228 | 3195 | 312 | 503 | 784 | 128 | 6 | 0 | 0 | 1 | 1 | 0 | 0 | 3 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 12.666666666666666 | 0 | 5 | 7 | 1 | 3 | 7 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0018779343 | 3.038744E-4 | 0.0 | I | 20240920 | N | ||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000000002680 | 上海海事大学 | CN | 1228 | 3195 | 253 | 6 | 0 | 0 | 0 | 0 | 2 | 1 | 1 | 1 | 0 | 1 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1.0 | 12.857142857142858 | 0.875 | 0 | 6 | 5 | 5 | 10 | 6 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0018779343 | 1.3436345E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000051264 | 南京师范大学 | CN | 1578 | 2583 | 473 | 391 | 3 | 0 | 0 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 26.5 | 0 | 5 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0011614402 | 6.145526E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000051264 | 南京师范大学 | CN | 1578 | 2583 | 993 | 585 | 5 | 0 | 0 | 3 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 22.5 | 0 | 6 | 5 | 10 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0019357336 | 3.8834045E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000115333 | 蔡国荣 | CN | 21 | 22 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.13636364 | 4.516304E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44253&VERSION=2 | KCN000000000115333 | 蔡国荣 | CN | 21 | 22 | 342 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.13636364 | 1.18324526E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000115333 | 蔡国荣 | CN | 21 | 22 | 4 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.5 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.18181819 | 3.1067237E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 157 | 37 | 33 | 7 | 0 | 0 | 1 | 5 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 24.2 | 0 | 3 | 5 | 2 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.2413793 | 4.6089018E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44141 | 구조적 세부 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | 구조적 세부 [B25J9/0009_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44141&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 15 | 10 | 4 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.10344828 | 0.004608295 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 230 | 119 | 15 | 0 | 0 | 1 | 5 | 5 | 0 | 4 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 19.857142857142858 | 0 | 5 | 5 | 2 | 6 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.51724136 | 3.072763E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 3 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 4 | 5 | 2 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.10344828 | 4.516304E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 526 | 638 | 18 | 0 | 0 | 2 | 6 | 5 | 0 | 5 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 19.857142857142858 | 0 | 5 | 5 | 2 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.62068963 | 1.3980256E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000000143310 | 上海智殷自动化科技 | CN | 6 | 29 | 211 | 102 | 15 | 0 | 0 | 1 | 5 | 5 | 0 | 4 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 19.857142857142858 | 0 | 5 | 5 | 2 | 6 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.51724136 | 3.3590864E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000151233 | 湖南汽车工程职业学院 | CN | 421 | 519 | 376 | 165 | 10 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 6 | 0 | 0 | 10 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 6 | 0 | 0 | 1.0 | 5.1 | 0 | 2 | 7 | 5 | 4 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.019267824 | 2.0485086E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000151233 | 湖南汽车工程职业学院 | CN | 421 | 519 | 337 | 5 | 0 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 1 | 0 | 0 | 5 | 0 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 1 | 0 | 0 | 1.0 | 6.333333333333333 | 0 | 5 | 7 | 5 | 4 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.009633912 | 7.527173E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000151233 | 湖南汽车工程职业学院 | CN | 421 | 519 | 625 | 244 | 16 | 0 | 0 | 0 | 1 | 1 | 3 | 2 | 2 | 7 | 0 | 0 | 16 | 0 | 0 | 0 | 1 | 1 | 3 | 2 | 2 | 7 | 0 | 0 | 1.0 | 5.647058823529412 | 0 | 3 | 7 | 7 | 5 | 4 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.030828517 | 1.2426895E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000000151233 | 湖南汽车工程职业学院 | CN | 421 | 519 | 327 | 155 | 10 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 6 | 0 | 0 | 10 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 6 | 0 | 0 | 1.0 | 5.1 | 0 | 2 | 7 | 5 | 4 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.019267824 | 2.2393909E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000258295 | 广州市淞滨工程技术 | CN | 8 | 164 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 5 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.018292682 | 4.516304E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000258295 | 广州市淞滨工程技术 | CN | 8 | 164 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 5 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.018292682 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000285383 | 美的智慧家居科技 | CN | 167 | 353 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 1.0 | 8.666666666666666 | 0 | 10 | 8 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.008498584 | 4.516304E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000285383 | 美的智慧家居科技 | CN | 167 | 353 | 5 | 0 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 1.0 | 9.0 | 0 | 11 | 13 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.014164306 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000000285383 | 美的智慧家居科技 | CN | 167 | 353 | 854 | 903 | 633 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 1.0 | 8.666666666666666 | 0 | 10 | 8 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.008498584 | 1.519372E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000554701 | 深圳市寒武纪智能科技 | CN | 12 | 20 | 5 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 2 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 1.0 | 12.5 | 0 | 8 | 7 | 10 | 10 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.25 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000001115798 | 重庆市牛迪科技发展 | CN | 6 | 6 | 146 | 3 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 32.77777777777778 | 0 | 10 | 10 | 10 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 | 6.145526E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001115798 | 重庆市牛迪科技发展 | CN | 6 | 6 | 969 | 3 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 32.77777777777778 | 0 | 10 | 10 | 10 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000001115798 | 重庆市牛迪科技发展 | CN | 6 | 6 | 127 | 3 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 32.77777777777778 | 0 | 10 | 10 | 10 | 11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 | 6.7181725E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000001303881 | 广州市巨轮机器人与智能制造 | CN | 14 | 21 | 633 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 7.0 | 0 | 4 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0.14285715 | 6.145526E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001303881 | 广州市巨轮机器人与智能制造 | CN | 14 | 21 | 5 | 0 | 0 | 0 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 1.0 | 9.666666666666666 | 0 | 6 | 8 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0.23809524 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000001303881 | 广州市巨轮机器人与智能制造 | CN | 14 | 21 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 7.0 | 0 | 4 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0.14285715 | 6.7181725E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000009636118 | 宁波携诚自动化科技 | CN | 9 | 9 | 302 | 281 | 3 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.666666666666666 | 0 | 5 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.33333334 | 6.145526E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000009636118 | 宁波携诚自动化科技 | CN | 9 | 9 | 466 | 820 | 5 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.4 | 0 | 5 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5555556 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000009636118 | 宁波携诚自动化科技 | CN | 9 | 9 | 284 | 229 | 3 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.666666666666666 | 0 | 5 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.33333334 | 6.7181725E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 459 | 116 | 185 | 8 | 0 | 0 | 1 | 4 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 0 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.0 | 0 | 4 | 8 | 3 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.004576659 | 1.7915128E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 251 | 130 | 32 | 0 | 0 | 2 | 6 | 3 | 1 | 3 | 4 | 0 | 9 | 0 | 22 | 0 | 0 | 1 | 5 | 3 | 0 | 5 | 4 | 0 | 2 | 0 | 1.0 | 16.133333333333333 | 0.5 | 0 | 4 | 8 | 4 | 3 | 4 | 3 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7 | 0 | 0 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.018306635 | 2.485379E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 896 | 386 | 795 | 235 | 3 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 7 | 8 | 8 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0017162472 | 1.519372E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44179 | [프로그램 제어 메니플레이터] 유체에 의한 것 | 4 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | [프로그램 제어 메니플레이터] 유체에 의한 것 [B25J9/14_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44179&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 14 | 4 | 5 | 10 | 3 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.5 | 0 | 3 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0017162472 | 0.0029013539 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 386 | 131 | 170 | 10 | 0 | 0 | 1 | 4 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 6 | 0 | 0 | 0 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.333333333333334 | 0.5 | 0 | 4 | 8 | 3 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.005720824 | 2.0485086E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||
| 44162 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 | 3 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44162&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 142 | 11 | 146 | 62 | 4 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0022883294 | 5.906675E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000004106 | 北华大学 | CN | 1316 | 1748 | 165 | 92 | 21 | 0 | 0 | 1 | 2 | 1 | 0 | 2 | 4 | 0 | 9 | 0 | 15 | 0 | 0 | 1 | 1 | 2 | 0 | 4 | 4 | 0 | 2 | 0 | 1.0 | 18.75 | 0 | 4 | 8 | 7 | 1 | 5 | 3 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.01201373 | 3.1614126E-4 | 0.0 | I | 20240920 | N | ||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000016973 | 李辉 | CN | 363 | 642 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 6 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.004672897 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000000016973 | 李辉 | CN | 363 | 642 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 5 | 6 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.004672897 | 4.516304E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000000459577 | 北京若唯世纪科技 | CN | 11 | 13 | 3 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 1.0 | 8.333333333333334 | 0 | 9 | 9 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.23076923 | 2.3300428E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000001601505 | 安吉八塔机器人 | CN | 20 | 44 | 5 | 0 | 0 | 2 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 16.4 | 0 | 6 | 10 | 1 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.11363637 | 3.8834045E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44279 | 접속부(joint) | 3 | 로봇 공학 | 로봇의 구성 요소 | 접속부(joint) [B25J17/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44279&VERSION=2 | KCN000000002438525 | 东莞市太行机电科技 | CN | 4 | 6 | 7 | 4 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.0 | 0 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.6666667 | 8.841733E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000002438525 | 东莞市太行机电科技 | CN | 4 | 6 | 569 | 4 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.0 | 0 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.6666667 | 3.1067237E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | KCN000000002438525 | 东莞市太行机电科技 | CN | 4 | 6 | 165 | 4 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.0 | 0 | 8 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.6666667 | 6.0217386E-5 | 0.0 | I | 20240920 | N | ||||||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000003357720 | 国网江西省电力有限公司检修分公司 | CN | 19 | 39 | 5 | 0 | 0 | 1 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.666666666666666 | 0 | 7 | 7 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.12820514 | 3.8834045E-5 | 0.0 | I | 20240920 | N | |||||||||||||||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | KCN000000006823465 | 合肥瑞堡科技发展 | CN | 12 | 12 | 73 | 10 | 5 | 9 | 0 | 0 | 0 | 5 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 0 | 5 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 10.555555555555555 | 0 | 9 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.75 | 8.1632653E-4 | 0.0 | I | 20240920 | N | |||||||||||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_05_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | KCN000000006823465 | 合肥瑞堡科技发展 | CN | 12 | 12 | 289 | 226 | 10 | 0 | 0 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 10 | 0 | 0 | 0 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 10.5 | 0 | 9 | 9 | 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.8333333 | 7.766809E-5 | 0.0 | I | 20240920 | N |
| 판매제공처 홈페이지 | www.patentpia.com | 라이선스 | Creative Commons Attribution |
|---|---|---|---|
| 판매 담당자 | 광개토연구소 | 권한 | Copyright 2021. PatentPia Inc. All Right Reserved |
| 연락처 | 02-569-7503 | 접근 권한 | public |
| 이메일 | kgt@patentpia.com | 상품 구분 | dataset |
| 품질측정 검사 | 품질측정기간 | ~ | |
|---|---|---|---|
| 품질측정기관 | 광개토연구소 | 품질측정연락정보 | 025697503 |
| 품질측정결과 | 품질측정내용 |
현재 준비중입니다.
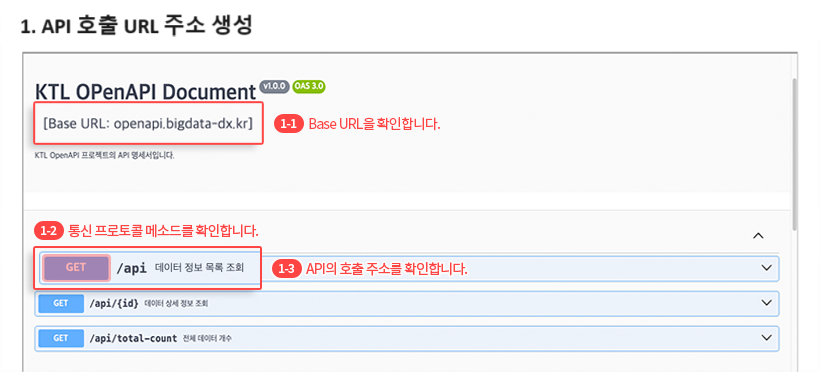
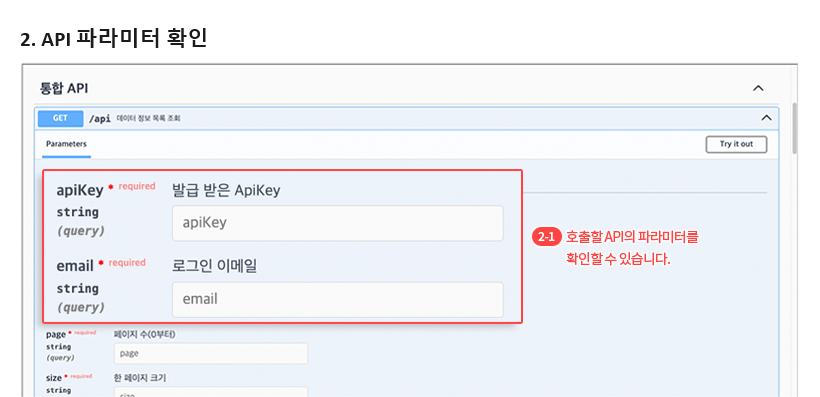
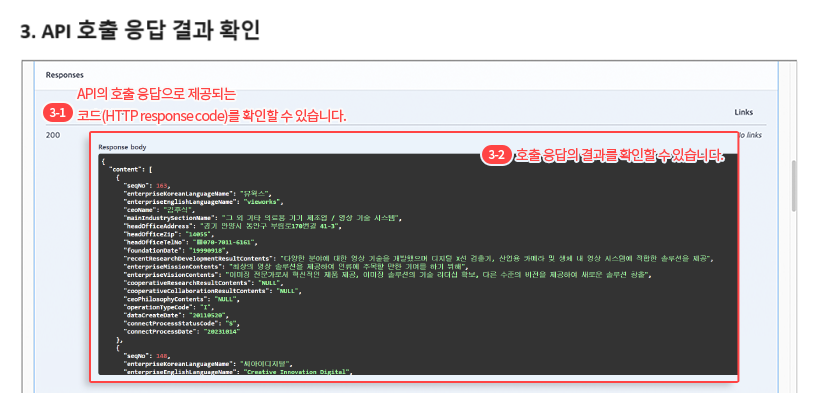
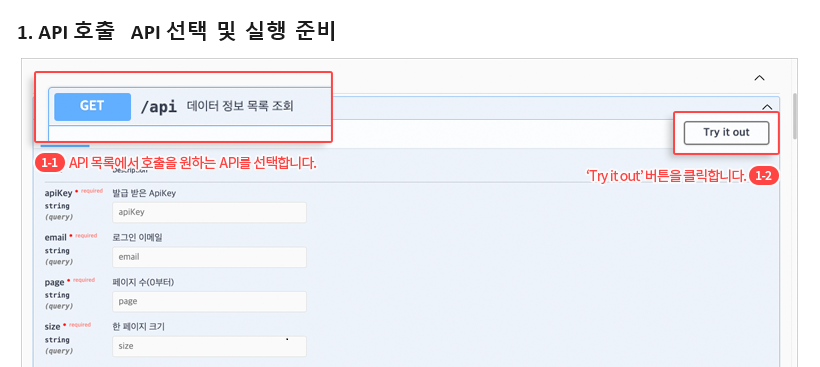
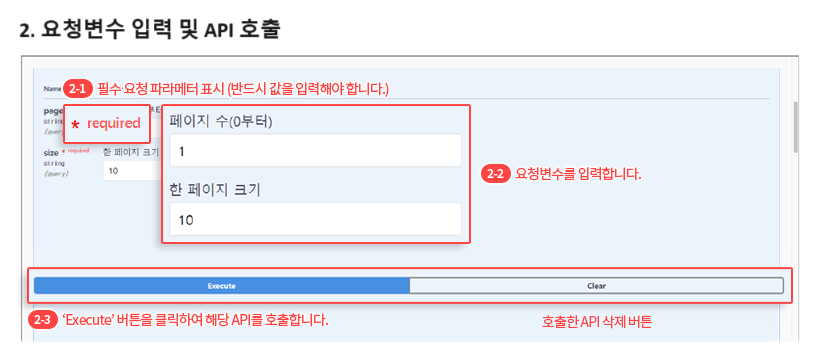
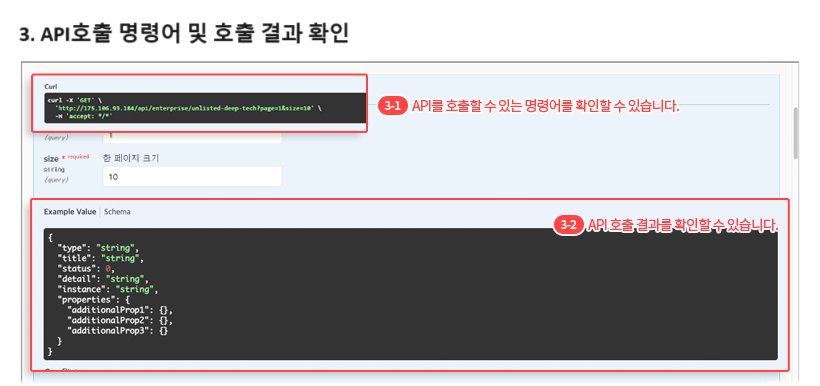




10047 경기도 김포시 양촌읍 황금1로 122,김포제조융합혁신센터 3층 한국산업기술시험원 ㅣ 사업자번호 : 113-82-06228 ㅣ 대표자명 : 김세종 ㅣ TEL: 02-860-1059 ㅣ E-mail: bigdata.dx@ktl.re.kr
Copyright ⓒ 2021 KOREA ENTERPRISE DATA. All Rights Reserved.