
가격협의 상품 및 유료상품의 구매를 원하실 경우 맞춤형 데이터 신청란에 글을 남겨주시면
신속히 답변드리도록 하겠습니다.




| 데이터 제공 포맷 | 데이터 제공 방식 | 데이터 파일 용량 |
|---|---|---|
| csv/zip | 다운로드 | 44.16 MB |
₩27,830,000
| 데이터셋명 | 로봇공학 기술분야의 기술 키워드에 대한 특허-세상 연계지표 | 데이터 유형 | csv/zip |
|---|---|---|---|
| 데이터 분야 | 특허 | 구축 데이터량 | 44.16 MB |
| 구축기관 | 광개토연구소 | 데이터 갱신 일자 | 2024-09-20 |
| 데이터 개방 일자 | 2021-09-16 | 데이터 이용 기한 | 무기한 |
| 데이터 갱신 주기 | - | 버전 | 1.0 |
| 주요 키워드 | 로봇공학, 기술, 기술동향, 구글, 검색 | ||
| 벨류체인 키워드 | 기술획득 | ||
| 소개 | 로봇공학 기술분야의 기술 키워드에 대한 특허-세상 연계지표 | ||
■ 기간 및 범위
- 기간 범위: 최근 11년 (2012~2022) / 국가 범위: 미국,한국,중국,일본,유럽
■ 활용 예제
- 본 데이터 상품을 활용하여 사용자는 다음과 같은 정보를 확인할 수 있습니다.
(상세한 활용 예제는 상품 정보 중 '데이터 활용사례' 탭을 클릭해주세요.)
1) 기술분야 계층 구조
2) 기술 키워드 국문
3) 국가 코드
4) 분석콘텐츠URL
5) 키워드ID, 영문/국문 명칭, 최초/최근 출현일자
6) 급성장/신규/매입/인수합병/심판 특허키워드 순위
7) 특허 공개/등록량
8) 국가 R&D 특허 공개량
9) 등록률, 독립항 권리 범위 유지율, 청구항수 유지율
10) 평균 등록 소요 기간
11) 소송/심판 집계 정보
12) 특허 거래 집계 정보(M&A 포함)
13) 구글검색문서량
| TCHNL_RELM_ID | TCHNL_RELM_NM | TCHNL_RELM_DEPT_CD | TCHNL_RELM_DEPT_1_NM | TCHNL_RELM_DEPT_2_NM | TCHNL_RELM_DEPT_3_NM | TCHNL_RELM_DEPT_4_NM | NTN_CD | ANLSS_CNCNS_URL | KWRD_ID | KWRD_ENGLH_NM | KWRD_KRLAN_NM | KWRD_FRST_EMRGC_DT | KWRD_RCNT_EMRGC_DT | GRADE_GRWTH_KWRD_RANK | NEW_KWRD_RANK | PCHS_PTNT_KWRD_RANK | UNMRG_PTNT_KWRD_RANK | RFRNG_PTNT_KWRD_RANK | AL_PTNT_OPQNT | THYR_PTNT_OPQNT | YR1_BFR_PTNT_OPQNT | YR2_BFR_PTNT_OPQNT | YR3_BFR_PTNT_OPQNT | YR4_BFR_PTNT_OPQNT | YR5_BFR_PTNT_OPQNT | YR6_BFR_PTNT_OPQNT | YR7_BFR_PTNT_OPQNT | YR8_BFR_PTNT_OPQNT | YR9_BFR_PTNT_OPQNT | YR10_BFR_PTNT_OPQNT | AL_PTNT_RGQNT | THYR_PTNT_RGQNT | YR1_BFR_PTNT_RGQNT | YR2_BFR_PTNT_RGQNT | YR3_BFR_PTNT_RGQNT | YR4_BFR_PTNT_RGQNT | YR5_BFR_PTNT_RGQNT | YR6_BFR_PTNT_RGQNT | YR7_BFR_PTNT_RGQNT | YR8_BFR_PTNT_RGQNT | YR9_BFR_PTNT_RGQNT | YR10_BFR_PTNT_RGQNT | AL_RGRT | AL_AVRG_RGSTN_NCPRD | AL_INCLM_RGSCP_MNRT | AL_CLCNT_MNRT | AL_NTTSK_PTNT_OPQNT | AL_PTNT_LWS_CNT | THYR_PTNT_LWS_CNT | YR1_BFR_PTNT_LWS_CNT | YR2_BFR_PTNT_LWS_CNT | YR3_BFR_PTNT_LWS_CNT | YR4_BFR_PTNT_LWS_CNT | YR5_BFR_PTNT_LWS_CNT | YR6_BFR_PTNT_LWS_CNT | YR7_BFR_PTNT_LWS_CNT | YR8_BFR_PTNT_LWS_CNT | YR9_BFR_PTNT_LWS_CNT | YR10_BFR_PTNT_LWS_CNT | AL_LWS_USE_PTCNT | THYR_LWS_USE_PTCNT | YR1_BFR_LWS_USE_PTCNT | YR2_BFR_LWS_USE_PTCNT | YR3_BFR_LWS_USE_PTCNT | YR4_BFR_LWS_USE_PTCNT | YR5_BFR_LWS_USE_PTCNT | YR6_BFR_LWS_USE_PTCNT | YR7_BFR_LWS_USE_PTCNT | YR8_BFR_LWS_USE_PTCNT | YR9_BFR_LWS_USE_PTCNT | YR10_BFR_LWS_USE_PTCNT | AL_PTNT_RFRNG_CNT | THYR_PTNT_RFRNG_CNT | YR1_BFR_PTNT_RFRNG_CNT | YR2_BFR_PTNT_RFRNG_CNT | YR3_BFR_PTNT_RFRNG_CNT | YR4_BFR_PTNT_RFRNG_CNT | YR5_BFR_PTNT_RFRNG_CNT | YR6_BFR_PTNT_RFRNG_CNT | YR7_BFR_PTNT_RFRNG_CNT | YR8_BFR_PTNT_RFRNG_CNT | YR9_BFR_PTNT_RFRNG_CNT | YR10_BFR_PTNT_RFRNG_CNT | AL_RFRNG_USE_PTCNT | THYR_RFRNG_USE_PTCNT | YR1_BFR_RFRNG_USE_PTCNT | YR2_BFR_RFRNG_USE_PTCNT | YR3_BFR_RFRNG_USE_PTCNT | YR4_BFR_RFRNG_USE_PTCNT | YR5_BFR_RFRNG_USE_PTCNT | YR6_BFR_RFRNG_USE_PTCNT | YR7_BFR_RFRNG_USE_PTCNT | YR8_BFR_RFRNG_USE_PTCNT | YR9_BFR_RFRNG_USE_PTCNT | YR10_BFR_RFRNG_USE_PTCNT | AL_DLNGS_PTCNT | THYR_DLNGS_PTCNT | YR1_BFR_DLNGS_PTCNT | YR2_BFR_DLNGS_PTCNT | YR3_BFR_DLNGS_PTCNT | YR4_BFR_DLNGS_PTCNT | YR5_BFR_DLNGS_PTCNT | YR6_BFR_DLNGS_PTCNT | YR7_BFR_DLNGS_PTCNT | YR8_BFR_DLNGS_PTCNT | YR9_BFR_DLNGS_PTCNT | YR10_BFR_DLNGS_PTCNT | AL_UNMRG_RLDLN_PTCNT | THYR_UNMRG_RLDLN_PTCNT | YR1_BFR_UNMRG_RLDLN_PTCNT | YR2_BFR_UNMRG_RLDLN_PTCNT | YR3_BFR_UNMRG_RLDLN_PTCNT | YR4_BFR_UNMRG_RLDLN_PTCNT | YR5_BFR_UNMRG_RLDLN_PTCNT | YR6_BFR_UNMRG_RLDLN_PTCNT | YR7_BFR_UNMRG_RLDLN_PTCNT | YR8_BFR_UNMRG_RLDLN_PTCNT | YR9_BFR_UNMRG_RLDLN_PTCNT | YR10_BFR_UNMRG_RLDLN_PTCNT | N1_QB_GOOGLE_SRCH_DCMNT_QNTT | N2_QB_GOOGLE_SRCH_DCMNT_QNTT | N3_QB_GOOGLE_SRCH_DCMNT_QNTT | N4_QB_GOOGLE_SRCH_DCMNT_QNTT | N5_QB_GOOGLE_SRCH_DCMNT_QNTT | N6_QB_GOOGLE_SRCH_DCMNT_QNTT | N7_QB_GOOGLE_SRCH_DCMNT_QNTT | N8_QB_GOOGLE_SRCH_DCMNT_QNTT | N9_QB_GOOGLE_SRCH_DCMNT_QNTT | N10_QB_GOOGLE_SRCH_DCMNT_QNTT | N11_QB_GOOGLE_SRCH_DCMNT_QNTT | N12_QB_GOOGLE_SRCH_DCMNT_QNTT | opert_sctin_cd | data_crtin_dt | cntct_prces_stts_cd | cntct_prces_dt | |
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 24525766 | domestic robot | 가정용 로봇(domestic robot) | 20190111 | 20230530 | 878 | 21 | 1 | 3 | 3 | 6 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 11 | 1 | 1 | 0 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 16.454545454545453 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3590000 | 207000 | 208000 | 173000 | 181000 | 240000 | 213000 | 177000 | 103000 | 102000 | 88200 | 99700 | I | 20240920 | N | |||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | 24525766 | domestic robot | 가정용 로봇(domestic robot) | 20190111 | 20230530 | 360 | 16 | 1 | 1 | 2 | 5 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 8 | 1 | 0 | 0 | 3 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 12.875 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3590000 | 207000 | 208000 | 173000 | 181000 | 240000 | 213000 | 177000 | 103000 | 102000 | 88200 | 99700 | I | 20240920 | N | |||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 24525766 | domestic robot | 가정용 로봇(domestic robot) | 20190111 | 20230530 | 893 | 17 | 1 | 1 | 2 | 5 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 1 | 0 | 0 | 3 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 12.222222222222221 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3590000 | 207000 | 208000 | 173000 | 181000 | 240000 | 213000 | 177000 | 103000 | 102000 | 88200 | 99700 | I | 20240920 | N | ||||||||||
| 33115 | 의료용 로봇 | 2 | 의료 기술 | 의료용 로봇 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33115&VERSION=2 | 2634106 | infrared fluorescence | 적외 형광(infrared fluorescence) | 20170926 | 20220830 | 921 | 16 | 0 | 6 | 1 | 2 | 3 | 2 | 2 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 132000 | 97900 | 112000 | 107000 | 125000 | 74000 | 130000 | 86600 | 99700 | 81800 | 79500 | 94300 | I | 20240920 | N | ||||||||||
| 32581 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 | 4 | 의료 기술 | 수술 | 컴퓨터 지원 수술; 수술에 사용되기에 특히 적합한 조종기(Manipulator) 또는 로봇 [A61B34/00_main] | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 [A61B34/20_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=32581&VERSION=2 | 2634106 | infrared fluorescence | 적외 형광(infrared fluorescence) | 20170926 | 20220830 | 145 | 16 | 0 | 6 | 1 | 2 | 3 | 2 | 2 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 132000 | 97900 | 112000 | 107000 | 125000 | 74000 | 130000 | 86600 | 99700 | 81800 | 79500 | 94300 | I | 20240920 | N | ||||||||
| 33154 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 | 3 | 의료 기술 | 의료용 로봇 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 [A61B34/20_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33154&VERSION=2 | 2634106 | infrared fluorescence | 적외 형광(infrared fluorescence) | 20170926 | 20220830 | 145 | 16 | 0 | 6 | 1 | 2 | 3 | 2 | 2 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 1 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 132000 | 97900 | 112000 | 107000 | 125000 | 74000 | 130000 | 86600 | 99700 | 81800 | 79500 | 94300 | I | 20240920 | N | |||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 4173188 | predictive control scheme | 예측 제어 방식(predictive control scheme) | 20221115 | 20221115 | 255 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 74200 | 57300 | 58200 | 70300 | 83000 | 67500 | 133000 | 64700 | 62400 | 126000 | 4030000 | 74500 | I | 20240920 | N | |||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 4362427 | radial basis function | 방사형 기저 함수(radial basis function) | 20160831 | 20230324 | 781 | 16 | 0 | 9 | 3 | 2 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 8 | 2 | 1 | 2 | 2 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 17.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 51100 | 50600 | 58700 | 65200 | 75800 | 87400 | 162000 | 95400 | 97900 | 79100 | 83500 | 110000 | I | 20240920 | N | |||||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44209&VERSION=2 | 4362427 | radial basis function | 방사형 기저 함수(radial basis function) | 20220315 | 20220315 | 641 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 51100 | 50600 | 58700 | 65200 | 75800 | 87400 | 162000 | 95400 | 97900 | 79100 | 83500 | 110000 | I | 20240920 | N | ||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 4362427 | radial basis function | 방사형 기저 함수(radial basis function) | 20160831 | 20230324 | 497 | 15 | 0 | 8 | 3 | 2 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 8 | 2 | 1 | 2 | 2 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 17.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 51100 | 50600 | 58700 | 65200 | 75800 | 87400 | 162000 | 95400 | 97900 | 79100 | 83500 | 110000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 4362427 | radial basis function | 방사형 기저 함수(radial basis function) | 20160831 | 20230324 | 580 | 13 | 0 | 7 | 3 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 7 | 2 | 1 | 2 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 15.142857142857142 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 51100 | 50600 | 58700 | 65200 | 75800 | 87400 | 162000 | 95400 | 97900 | 79100 | 83500 | 110000 | I | 20240920 | N | |||||||||
| 33125 | 마스터-슬레이브 (master-slave) 로봇 | 4 | 의료 기술 | 의료용 로봇 | 수술용 로봇 [A61B34/30_main] | 마스터-슬레이브 (master-slave) 로봇 [A61B34/37_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33125&VERSION=2 | 4414589 | real feeling | 실제 감(real feeling) | 20221101 | 20230516 | 232 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 70.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 401000000 | 172000000 | 153000000 | 141000000 | 133000000 | 32600000 | 54600000 | 40300000 | 39000000 | 71700 | 71700 | 35400000 | I | 20240920 | N | ||||||||
| 33115 | 의료용 로봇 | 2 | 의료 기술 | 의료용 로봇 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33115&VERSION=2 | 4414589 | real feeling | 실제 감(real feeling) | 20210716 | 20230516 | 912 | 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 43.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 401000000 | 172000000 | 153000000 | 141000000 | 133000000 | 32600000 | 54600000 | 40300000 | 39000000 | 71700 | 71700 | 35400000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 474202 | batch production | 배치 제조(batch production) | 20210820 | 20230512 | 602 | 4 | 0 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 17.333333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7790000 | 5270000 | 4900000 | 5610000 | 6220000 | 5650000 | 13400000 | 5090000 | 4670000 | 297000 | 337000 | 3840000 | I | 20240920 | N | |||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20130612 | 20221118 | 84 | 0 | 9 | 9 | 15 | 14 | 9 | 17 | 8 | 2 | 0 | 1 | 45 | 0 | 2 | 3 | 9 | 10 | 3 | 11 | 4 | 2 | 0 | 1 | 1.0 | 13.8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100901 | 20230328 | 88 | 1 | 4 | 8 | 8 | 15 | 13 | 11 | 8 | 5 | 6 | 4 | 50 | 0 | 0 | 2 | 9 | 5 | 9 | 9 | 3 | 5 | 3 | 4 | 1.0 | 10.12 | 1.1418439 | 1.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | |||||||||
| 44223 | 센서 장치 | 4 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | 센서 장치 [B25J19/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44223&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20160608 | 20221118 | 156 | 8 | 0 | 1 | 1 | 2 | 1 | 0 | 1 | 2 | 0 | 0 | 0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1.0 | 14.666666666666666 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20101208 | 20230516 | 182 | 5 | 15 | 24 | 22 | 23 | 13 | 19 | 18 | 1 | 33 | 5 | 83 | 3 | 7 | 16 | 14 | 11 | 12 | 10 | 6 | 0 | 0 | 3 | 1.0 | 17.433734939759034 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100818 | 20230602 | 1275 | 26 | 101 | 137 | 201 | 179 | 188 | 178 | 114 | 46 | 72 | 15 | 660 | 15 | 26 | 69 | 147 | 92 | 102 | 95 | 59 | 33 | 7 | 10 | 1.0 | 13.0 | 0.84869975 | 0.9097222 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44209&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100908 | 20220125 | 25 | 0 | 1 | 1 | 4 | 4 | 5 | 3 | 3 | 1 | 0 | 1 | 15 | 0 | 1 | 1 | 4 | 1 | 3 | 0 | 3 | 1 | 0 | 1 | 1.0 | 15.133333333333333 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100908 | 20230516 | 215 | 5 | 17 | 26 | 28 | 28 | 18 | 23 | 23 | 2 | 33 | 6 | 101 | 3 | 9 | 17 | 18 | 12 | 15 | 11 | 10 | 1 | 0 | 4 | 1.0 | 17.00990099009901 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | |||||||||||
| 44244 | 차 또는 휠에 설치되어 있는 메니플레이터 | 3 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | 차 또는 휠에 설치되어 있는 메니플레이터 [B25J5/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44244&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100901 | 20230328 | 85 | 1 | 4 | 8 | 8 | 15 | 12 | 11 | 6 | 5 | 6 | 4 | 49 | 0 | 0 | 2 | 9 | 5 | 9 | 8 | 3 | 5 | 3 | 4 | 1.0 | 9.959183673469388 | 1.1418439 | 1.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20111130 | 20230602 | 819 | 17 | 67 | 85 | 137 | 113 | 139 | 117 | 75 | 31 | 32 | 4 | 421 | 10 | 12 | 41 | 101 | 61 | 69 | 60 | 42 | 20 | 4 | 1 | 1.0 | 11.807600950118765 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20100818 | 20230602 | 976 | 20 | 81 | 104 | 165 | 135 | 157 | 144 | 87 | 39 | 33 | 5 | 513 | 12 | 18 | 50 | 120 | 75 | 78 | 77 | 47 | 27 | 4 | 2 | 1.0 | 12.510721247563353 | 0.5555556 | 0.8796296 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | |||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20110831 | 20230516 | 121 | 5 | 12 | 15 | 13 | 6 | 9 | 13 | 11 | 1 | 32 | 1 | 46 | 3 | 4 | 13 | 7 | 1 | 9 | 5 | 4 | 0 | 0 | 0 | 1.0 | 19.456521739130434 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44213 | 로봇 센싱 | 3 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44213&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20130821 | 20221118 | 19 | 0 | 1 | 1 | 3 | 2 | 1 | 6 | 4 | 0 | 0 | 1 | 9 | 0 | 1 | 0 | 2 | 0 | 1 | 1 | 3 | 0 | 0 | 1 | 1.0 | 18.77777777777778 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||||
| 44177 | [프로그램 제어 메니플레이터] 전기적인 것 | 4 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | [프로그램 제어 메니플레이터] 전기적인 것 [B25J9/12_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44177&VERSION=2 | 4912138 | service robot | 서비스 로봇(service robot) | 20170222 | 20210209 | 410 | 4 | 0 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 24.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 24100000 | 16400000 | 30500000 | 16000000 | 14300000 | 15300000 | 15400000 | 12900000 | 19600000 | 9440000 | 11400000 | 36600000 | I | 20240920 | N | ||||||||
| 32574 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 | 4 | 의료 기술 | 수술 | 컴퓨터 지원 수술; 수술에 사용되기에 특히 적합한 조종기(Manipulator) 또는 로봇 [A61B34/00_main] | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 [A61B34/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=32574&VERSION=2 | 5435415 | target anatomy | 표적 해부 체(target anatomy) | 20200424 | 20221021 | 449 | 3 | 0 | 1 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5360000 | 181000 | 166000 | 175000 | 207000 | 193000 | 283000 | 237000 | 178000 | 573000 | 33900000 | 200000 | I | 20240920 | N | |||||||
| 33147 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 | 3 | 의료 기술 | 의료용 로봇 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 [A61B34/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33147&VERSION=2 | 5435415 | target anatomy | 표적 해부 체(target anatomy) | 20200424 | 20221021 | 449 | 3 | 0 | 1 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5360000 | 181000 | 166000 | 175000 | 207000 | 193000 | 283000 | 237000 | 178000 | 573000 | 33900000 | 200000 | I | 20240920 | N | ||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 5890189 | vision recognition | 비전 인식(vision recognition) | 20211001 | 20230307 | 394 | 2 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 17000000 | 11500000 | 10700000 | 12800000 | 14700000 | 10800000 | 15200000 | 13600000 | 18300000 | 401000 | 385000 | 21100000 | I | 20240920 | N | |||||||||||
| 44268 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 [B25J15/08_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44268&VERSION=2 | 2821066 | joint transmission | 조인트 송신(joint transmission) | 20220107 | 20230314 | 194 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 16.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 8210000 | 4810000 | 4790000 | 5450000 | 5500000 | 5020000 | 9340000 | 4300000 | 2820000 | 4380000 | 470000 | 3960000 | I | 20240920 | N | ||||||||
| 44280 | 손목(Wrist)조인트 | 4 | 로봇 공학 | 로봇의 구성 요소 | 접속부(joint) [B25J17/00_main] | 손목(Wrist)조인트 [B25J17/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44280&VERSION=2 | 2821066 | joint transmission | 조인트 송신(joint transmission) | 20130508 | 20220805 | 19 | 0 | 2 | 4 | 2 | 2 | 7 | 0 | 1 | 0 | 0 | 1 | 10 | 0 | 0 | 2 | 2 | 1 | 4 | 0 | 0 | 0 | 0 | 1 | 1.0 | 12.7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 8210000 | 4810000 | 4790000 | 5450000 | 5500000 | 5020000 | 9340000 | 4300000 | 2820000 | 4380000 | 470000 | 3960000 | I | 20240920 | N | |||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 2894522 | learned model | 학습된 모델(learned model) | 20210730 | 20220405 | 173 | 6 | 0 | 2 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 20000000 | 13000000 | 12700000 | 13900000 | 12300000 | 19900000 | 38900000 | 18800000 | 19000000 | 18600000 | 13900000 | 20600000 | I | 20240920 | N | ||||||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44209&VERSION=2 | 2894522 | learned model | 학습된 모델(learned model) | 20210730 | 20211029 | 141 | 10 | 4 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 20000000 | 13000000 | 12700000 | 13900000 | 12300000 | 19900000 | 38900000 | 18800000 | 19000000 | 18600000 | 13900000 | 20600000 | I | 20240920 | N | |||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 2894522 | learned model | 학습된 모델(learned model) | 20210730 | 20220325 | 210 | 5 | 0 | 1 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 20000000 | 13000000 | 12700000 | 13900000 | 12300000 | 19900000 | 38900000 | 18800000 | 19000000 | 18600000 | 13900000 | 20600000 | I | 20240920 | N | |||||||||||
| 33116 | 수술용 로봇 | 3 | 의료 기술 | 의료용 로봇 | 수술용 로봇 [A61B34/30_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33116&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20170104 | 20221115 | 10 | 0 | 5 | 0 | 0 | 1 | 1 | 3 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 28.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | ||||||||||
| 33123 | [수술용 로봇] 자동으로 작동하는 것 | 4 | 의료 기술 | 의료용 로봇 | 수술용 로봇 [A61B34/30_main] | [수술용 로봇] 자동으로 작동하는 것 [A61B34/32_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33123&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20220805 | 20220805 | 27 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | |||||||||
| 44213 | 로봇 센싱 | 3 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44213&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20221101 | 20221101 | 787 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 34.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | |||||||||
| 44223 | 센서 장치 | 4 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | 센서 장치 [B25J19/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44223&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20221101 | 20221101 | 371 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 34.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | ||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20160810 | 20230516 | 579 | 19 | 3 | 9 | 4 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 12 | 1 | 5 | 4 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1.0 | 29.666666666666668 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | ||||||||||
| 32601 | 수술용 로봇 | 4 | 의료 기술 | 수술 | 컴퓨터 지원 수술; 수술에 사용되기에 특히 적합한 조종기(Manipulator) 또는 로봇 [A61B34/00_main] | 수술용 로봇 [A61B34/30_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=32601&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20170104 | 20221115 | 10 | 0 | 5 | 0 | 0 | 1 | 1 | 3 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 0 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 28.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | |||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20191022 | 20220208 | 590 | 6 | 0 | 1 | 3 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 329165 | arm tool | 암 공구(arm tool) | 20160810 | 20230516 | 704 | 14 | 3 | 5 | 4 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 9 | 1 | 3 | 4 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 33.333333333333336 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 26500000 | 18100000 | 16700000 | 16900000 | 17300000 | 19600000 | 23300000 | 9890000 | 10800000 | 9230000 | 8060000 | 12800000 | I | 20240920 | N | |||||||||
| 44213 | 로봇 센싱 | 3 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44213&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20160113 | 20211015 | 342 | 5 | 0 | 0 | 2 | 0 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 15.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20121114 | 20230310 | 213 | 4 | 21 | 29 | 44 | 27 | 36 | 25 | 14 | 6 | 3 | 3 | 125 | 2 | 5 | 17 | 34 | 13 | 24 | 14 | 7 | 4 | 2 | 2 | 1.0 | 14.296 | 0.54545456 | 1.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | ||||||||||
| 44223 | 센서 장치 | 4 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | 센서 장치 [B25J19/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44223&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20210302 | 20211015 | 268 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44209&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20160113 | 20220524 | 704 | 3 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1.0 | 15.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20130612 | 20230310 | 136 | 2 | 14 | 15 | 33 | 20 | 27 | 13 | 8 | 2 | 1 | 1 | 76 | 2 | 2 | 10 | 26 | 10 | 14 | 4 | 5 | 2 | 1 | 0 | 1.0 | 12.81578947368421 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20130417 | 20230131 | 817 | 39 | 2 | 1 | 8 | 10 | 5 | 6 | 3 | 2 | 1 | 0 | 1 | 25 | 0 | 1 | 5 | 7 | 2 | 6 | 2 | 0 | 1 | 0 | 1 | 1.0 | 13.92 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | ||||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20130612 | 20230310 | 123 | 1 | 14 | 11 | 28 | 18 | 27 | 13 | 7 | 2 | 1 | 1 | 66 | 1 | 2 | 8 | 21 | 9 | 14 | 4 | 4 | 2 | 1 | 0 | 1.0 | 11.636363636363637 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20121114 | 20221104 | 28 | 0 | 5 | 4 | 1 | 1 | 1 | 8 | 3 | 3 | 0 | 1 | 17 | 0 | 1 | 2 | 0 | 1 | 3 | 5 | 2 | 1 | 0 | 1 | 1.0 | 20.235294117647058 | 0.54545456 | 1.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | ||||||||
| 44309 | 안전 장치 | 4 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | 안전 장치 [B25J19/06_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44309&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20160120 | 20230217 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1.0 | 52.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20160120 | 20230217 | 448 | 12 | 1 | 0 | 4 | 4 | 2 | 0 | 0 | 1 | 0 | 0 | 0 | 9 | 1 | 0 | 2 | 4 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1.0 | 22.11111111111111 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | |||||||||
| 44159 | [프로그램 제어 메니플레이터] 다관절의 암에 특징이 있는 것 | 4 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | [프로그램 제어 메니플레이터] 다관절의 암에 특징이 있는 것 [B25J9/06_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44159&VERSION=2 | 3350109 | monitoring robot | 감시 로봇(monitoring robot) | 20210831 | 20220624 | 47 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7890000 | 4620000 | 5030000 | 4390000 | 4380000 | 252000 | 306000 | 194000 | 180000 | 150000 | 148000 | 159000 | I | 20240920 | N | ||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 5942512 | weight coefficient | 웨이트 계수(weight coefficient) | 20171208 | 20220913 | 610 | 17 | 0 | 8 | 3 | 3 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 22.8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 304000 | 4870 | 572000 | 4270000 | 8250000 | 352000 | 8960000 | 362000 | 387000 | 236000 | 95000000 | 2120000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 5942512 | weight coefficient | 웨이트 계수(weight coefficient) | 20171208 | 20220913 | 613 | 15 | 0 | 7 | 3 | 3 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 5 | 0 | 0 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 22.8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 304000 | 4870 | 572000 | 4270000 | 8250000 | 352000 | 8960000 | 362000 | 387000 | 236000 | 95000000 | 2120000 | I | 20240920 | N | |||||||||
| 33115 | 의료용 로봇 | 2 | 의료 기술 | 의료용 로봇 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33115&VERSION=2 | 758994 | cerebral hemorrhage | 뇌출혈(cerebral hemorrhage) | 20160309 | 20220301 | 11 | 0 | 2 | 0 | 3 | 2 | 2 | 0 | 2 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 1.0 | 10.666666666666666 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 56400 | 41000 | 37200 | 39600 | 48200 | 59700 | 83800 | 62400 | 64400 | 48300 | 41100 | 54400 | I | 20240920 | N | |||||||||||
| 33154 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 | 3 | 의료 기술 | 의료용 로봇 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 [A61B34/20_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33154&VERSION=2 | 758994 | cerebral hemorrhage | 뇌출혈(cerebral hemorrhage) | 20160309 | 20220301 | 7 | 0 | 2 | 0 | 1 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1.0 | 7.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 56400 | 41000 | 37200 | 39600 | 48200 | 59700 | 83800 | 62400 | 64400 | 48300 | 41100 | 54400 | I | 20240920 | N | ||||||||||
| 32581 | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 | 4 | 의료 기술 | 수술 | 컴퓨터 지원 수술; 수술에 사용되기에 특히 적합한 조종기(Manipulator) 또는 로봇 [A61B34/00_main] | 수술 네비게이션 시스템; 추적 또는 수술기구를 유도하기 위한 장치 [A61B34/20_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=32581&VERSION=2 | 758994 | cerebral hemorrhage | 뇌출혈(cerebral hemorrhage) | 20160309 | 20220301 | 7 | 0 | 2 | 0 | 1 | 2 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1.0 | 7.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 56400 | 41000 | 37200 | 39600 | 48200 | 59700 | 83800 | 62400 | 64400 | 48300 | 41100 | 54400 | I | 20240920 | N | |||||||||
| 44213 | 로봇 센싱 | 3 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44213&VERSION=2 | 1128259 | cooperation process | 협력 프로세스(cooperation process) | 20220624 | 20220624 | 808 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 30.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 17200000 | 12800000 | 13900000 | 13500000 | 15500000 | 10400000 | 14500000 | 10800000 | 11500000 | 262000 | 310000 | 16200000 | I | 20240920 | N | |||||||||
| 44223 | 센서 장치 | 4 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | 센서 장치 [B25J19/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44223&VERSION=2 | 1128259 | cooperation process | 협력 프로세스(cooperation process) | 20220624 | 20220624 | 379 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 30.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 17200000 | 12800000 | 13900000 | 13500000 | 15500000 | 10400000 | 14500000 | 10800000 | 11500000 | 262000 | 310000 | 16200000 | I | 20240920 | N | ||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 1128259 | cooperation process | 협력 프로세스(cooperation process) | 20220311 | 20221230 | 536 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 28.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 17200000 | 12800000 | 13900000 | 13500000 | 15500000 | 10400000 | 14500000 | 10800000 | 11500000 | 262000 | 310000 | 16200000 | I | 20240920 | N | ||||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | 1128259 | cooperation process | 협력 프로세스(cooperation process) | 20220311 | 20220624 | 422 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 28.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 17200000 | 12800000 | 13900000 | 13500000 | 15500000 | 10400000 | 14500000 | 10800000 | 11500000 | 262000 | 310000 | 16200000 | I | 20240920 | N | |||||||||
| 44268 | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 | 4 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | [손잡이부(gripping head)또는 기타 엔드 이펙터] 손가락 부재(finger memember)를 가지는 것 [B25J15/08_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44268&VERSION=2 | 2006950 | finger device | 손가락 장치(finger device) | 20100915 | 20230526 | 51 | 0 | 1 | 5 | 1 | 0 | 1 | 7 | 15 | 2 | 3 | 1 | 37 | 1 | 1 | 4 | 1 | 4 | 7 | 5 | 0 | 1 | 3 | 1 | 1.0 | 25.0 | 0.8397874 | 0.8288961 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5660 | 23900000 | 22500000 | 23100000 | 25100000 | 21000000 | 27600000 | 20900000 | 23300000 | 23800000 | 15400000 | 25100000 | I | 20240920 | N | |||||||
| 44253 | 손잡이부(gripping head)또는 기타 엔드 이펙터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 손잡이부(gripping head)또는 기타 엔드 이펙터 [B25J15/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44253&VERSION=2 | 2006950 | finger device | 손가락 장치(finger device) | 20100602 | 20230526 | 314 | 5 | 8 | 30 | 31 | 35 | 33 | 42 | 56 | 5 | 6 | 8 | 215 | 7 | 6 | 19 | 29 | 26 | 46 | 23 | 6 | 4 | 6 | 6 | 1.0 | 22.697674418604652 | 1.8280935 | 0.8795918 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5660 | 23900000 | 22500000 | 23100000 | 25100000 | 21000000 | 27600000 | 20900000 | 23300000 | 23800000 | 15400000 | 25100000 | I | 20240920 | N | ||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 2006950 | finger device | 손가락 장치(finger device) | 20100602 | 20230526 | 331 | 6 | 9 | 32 | 33 | 37 | 37 | 43 | 59 | 5 | 6 | 8 | 225 | 8 | 8 | 19 | 32 | 26 | 49 | 23 | 7 | 4 | 6 | 6 | 1.0 | 22.68 | 1.8280935 | 0.8795918 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5660 | 23900000 | 22500000 | 23100000 | 25100000 | 21000000 | 27600000 | 20900000 | 23300000 | 23800000 | 15400000 | 25100000 | I | 20240920 | N | ||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 2006950 | finger device | 손가락 장치(finger device) | 20100602 | 20230526 | 315 | 5 | 8 | 30 | 32 | 35 | 33 | 42 | 56 | 5 | 6 | 8 | 215 | 7 | 6 | 19 | 29 | 26 | 46 | 23 | 6 | 4 | 6 | 6 | 1.0 | 22.697674418604652 | 1.8280935 | 0.8795918 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5660 | 23900000 | 22500000 | 23100000 | 25100000 | 21000000 | 27600000 | 20900000 | 23300000 | 23800000 | 15400000 | 25100000 | I | 20240920 | N | |||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 2243654 | gaussian process | 가우시안 프로세스(gaussian process) | 20160525 | 20230505 | 311 | 17 | 1 | 10 | 4 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 6 | 1 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 18.833333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1800000 | 1550000 | 3020000 | 3350000 | 4040000 | 156000 | 286000 | 197000 | 199000 | 206000 | 181000 | 240000 | I | 20240920 | N | |||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 2243654 | gaussian process | 가우시안 프로세스(gaussian process) | 20160525 | 20230505 | 697 | 18 | 2 | 10 | 4 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 6 | 1 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 18.833333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1800000 | 1550000 | 3020000 | 3350000 | 4040000 | 156000 | 286000 | 197000 | 199000 | 206000 | 181000 | 240000 | I | 20240920 | N | |||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 2243654 | gaussian process | 가우시안 프로세스(gaussian process) | 20160525 | 20230505 | 353 | 17 | 1 | 10 | 4 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 6 | 1 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 18.833333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1800000 | 1550000 | 3020000 | 3350000 | 4040000 | 156000 | 286000 | 197000 | 199000 | 206000 | 181000 | 240000 | I | 20240920 | N | ||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 2243654 | gaussian process | 가우시안 프로세스(gaussian process) | 20160525 | 20230505 | 359 | 17 | 1 | 10 | 4 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 6 | 1 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1.0 | 18.833333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1800000 | 1550000 | 3020000 | 3350000 | 4040000 | 156000 | 286000 | 197000 | 199000 | 206000 | 181000 | 240000 | I | 20240920 | N | |||||||||
| 44209 | 메니플레이터 제어 | 3 | 로봇 공학 | 로봇 제어 | 메니플레이터 제어 [B25J13/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44209&VERSION=2 | 2277636 | gesture recognizer | 제스처 인식기(gesture recognizer) | 20220920 | 20230324 | 821 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4080 | 1780 | 2130 | 1890 | 2010 | 2650 | 4130 | 3230 | 3040 | 2280 | 2070 | 3500 | I | 20240920 | N | |||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 411178 | avoidance system | 회피 시스템(avoidance system) | 20150708 | 20221101 | 24 | 0 | 7 | 5 | 0 | 2 | 3 | 2 | 4 | 1 | 0 | 0 | 7 | 0 | 1 | 1 | 0 | 1 | 0 | 2 | 2 | 0 | 0 | 0 | 1.0 | 8.571428571428571 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3060000 | 247000 | 229000 | 264000 | 259000 | 323000 | 5530000 | 342000 | 325000 | 263000 | 207000 | 355000 | I | 20240920 | N | ||||||||||
| 44213 | 로봇 센싱 | 3 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44213&VERSION=2 | 411178 | avoidance system | 회피 시스템(avoidance system) | 20140618 | 20221014 | 230 | 7 | 0 | 2 | 0 | 1 | 0 | 1 | 2 | 0 | 0 | 1 | 0 | 4 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1.0 | 18.0 | 0.75 | 1.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3060000 | 247000 | 229000 | 264000 | 259000 | 323000 | 5530000 | 342000 | 325000 | 263000 | 207000 | 355000 | I | 20240920 | N | |||||||
| 44223 | 센서 장치 | 4 | 로봇 공학 | 로봇 제어 | 로봇 센싱 | 센서 장치 [B25J19/02_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44223&VERSION=2 | 411178 | avoidance system | 회피 시스템(avoidance system) | 20220726 | 20221014 | 209 | 107 | 2 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 21.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3060000 | 247000 | 229000 | 264000 | 259000 | 323000 | 5530000 | 342000 | 325000 | 263000 | 207000 | 355000 | I | 20240920 | N | |||||||
| 44236 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 | 2 | 로봇 공학 | [프로그램 제어] 특정 종류의 메니플레이터에 특징이 있는 것 [B25J9/1615_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44236&VERSION=2 | 411178 | avoidance system | 회피 시스템(avoidance system) | 20210917 | 20230131 | 141 | 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 11.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3060000 | 247000 | 229000 | 264000 | 259000 | 323000 | 5530000 | 342000 | 325000 | 263000 | 207000 | 355000 | I | 20240920 | N | ||||||||||
| 33147 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 | 3 | 의료 기술 | 의료용 로봇 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 [A61B34/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33147&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20221004 | 20221021 | 305 | 148 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | |||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20200117 | 20230324 | 259 | 18 | 1 | 3 | 9 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10 | 1 | 0 | 5 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 27.8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | |||||||||
| 32574 | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 | 4 | 의료 기술 | 수술 | 컴퓨터 지원 수술; 수술에 사용되기에 특히 적합한 조종기(Manipulator) 또는 로봇 [A61B34/00_main] | 외과 수술의 컴퓨터 지원 계획 | 시뮬레이션 또는 모델링 [A61B34/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=32574&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20221004 | 20221021 | 305 | 148 | 3 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | ||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20170728 | 20230324 | 284 | 42 | 1 | 8 | 11 | 14 | 5 | 2 | 1 | 0 | 0 | 0 | 0 | 18 | 1 | 1 | 7 | 8 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 24.22222222222222 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | |||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20180727 | 20230324 | 164 | 29 | 1 | 5 | 11 | 7 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 14 | 1 | 1 | 7 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 27.071428571428573 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | ||||||||||
| 33115 | 의료용 로봇 | 2 | 의료 기술 | 의료용 로봇 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33115&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20180316 | 20230328 | 647 | 9 | 1 | 3 | 4 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 8.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | ||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 4118224 | position parameter | 위치 파라미터(position parameter) | 20180727 | 20230324 | 185 | 28 | 1 | 5 | 11 | 6 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 14 | 1 | 1 | 7 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 27.071428571428573 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 12800000 | 10300000 | 11500000 | 13200000 | 15900000 | 5120000 | 13200000 | 7830000 | 10500000 | 5960000 | 5090000 | 13400000 | I | 20240920 | N | |||||||||
| 33115 | 의료용 로봇 | 2 | 의료 기술 | 의료용 로봇 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33115&VERSION=2 | 439600 | ball assembly | 볼 조립체(ball assembly) | 20210720 | 20220429 | 947 | 3 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 3.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10200000 | 5200000 | 679000 | 6210000 | 5440000 | 4780000 | 6630000 | 5590000 | 4800000 | 4310000 | 2540000 | 4170000 | I | 20240920 | N | ||||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | 4416303 | real time monitoring system | 실시간 감시 시스템(real time monitoring system) | 20220318 | 20220318 | 261 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 14200000 | 11700000 | 12300000 | 13200000 | 15500000 | 14700000 | 56300000 | 21700000 | 22800000 | 26300000 | 16900000 | 27400000 | I | 20240920 | N | ||||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 4680766 | rigidity parameter | 강성 파라미터(rigidity parameter) | 20210716 | 20230321 | 108 | 6 | 1 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 31.333333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 38400 | 35000 | 37700 | 46100 | 52600 | 23000 | 49800 | 34600 | 29200 | 24800 | 25500 | 32500 | I | 20240920 | N | |||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 4680766 | rigidity parameter | 강성 파라미터(rigidity parameter) | 20210716 | 20230321 | 129 | 7 | 1 | 5 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 27.25 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 38400 | 35000 | 37700 | 46100 | 52600 | 23000 | 49800 | 34600 | 29200 | 24800 | 25500 | 32500 | I | 20240920 | N | |||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 4680766 | rigidity parameter | 강성 파라미터(rigidity parameter) | 20210716 | 20230321 | 128 | 6 | 1 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 31.333333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 38400 | 35000 | 37700 | 46100 | 52600 | 23000 | 49800 | 34600 | 29200 | 24800 | 25500 | 32500 | I | 20240920 | N | ||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 4680766 | rigidity parameter | 강성 파라미터(rigidity parameter) | 20210716 | 20230321 | 124 | 6 | 1 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 31.333333333333332 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 38400 | 35000 | 37700 | 46100 | 52600 | 23000 | 49800 | 34600 | 29200 | 24800 | 25500 | 32500 | I | 20240920 | N | |||||||||
| 33124 | [수술용 로봇] 원격 수술용 | 4 | 의료 기술 | 의료용 로봇 | 수술용 로봇 [A61B34/30_main] | [수술용 로봇] 원격 수술용 [A61B34/35_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=33124&VERSION=2 | 5605067 | tracking storage | 추적 저장 장치(tracking storage) | 20211112 | 20211112 | 479 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 34800000 | 19500000 | 21000000 | 17800000 | 17900000 | 24300000 | 44900000 | 22400000 | 26400000 | 8960000 | 119000 | 16100000 | I | 20240920 | N | |||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 5753754 | unscented kalman filter | 무적 칼만 필터(unscented kalman filter) | 20210803 | 20230523 | 282 | 4 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2700 | 2370 | 2410 | 2900 | 3060 | 3440 | 6010 | 3960 | 4000 | 3430 | 3710 | 4740 | I | 20240920 | N | |||||||||
| 44138 | 로봇 공학 | 1 | 로봇 공학 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44138&VERSION=2 | 5753754 | unscented kalman filter | 무적 칼만 필터(unscented kalman filter) | 20210803 | 20230523 | 401 | 4 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2700 | 2370 | 2410 | 2900 | 3060 | 3440 | 6010 | 3960 | 4000 | 3430 | 3710 | 4740 | I | 20240920 | N | |||||||||||
| 44139 | 로봇 제어 | 2 | 로봇 공학 | 로봇 제어 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44139&VERSION=2 | 5753754 | unscented kalman filter | 무적 칼만 필터(unscented kalman filter) | 20210803 | 20230523 | 314 | 4 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2700 | 2370 | 2410 | 2900 | 3060 | 3440 | 6010 | 3960 | 4000 | 3430 | 3710 | 4740 | I | 20240920 | N | ||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 5753754 | unscented kalman filter | 무적 칼만 필터(unscented kalman filter) | 20210803 | 20230523 | 311 | 4 | 0 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 25.75 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2700 | 2370 | 2410 | 2900 | 3060 | 3440 | 6010 | 3960 | 4000 | 3430 | 3710 | 4740 | I | 20240920 | N | |||||||||
| 44162 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 | 3 | 로봇 공학 | 로봇 제어 | [프로그램 제어 메니플레이터] 메니플레이터 요소의 위치 결정수단에 특징이 있는 것 [B25J9/10_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44162&VERSION=2 | 86770410 | industrial machine control | 산업기계의 제어(industrial machine control) | 20221125 | 20221125 | 263 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 15200000 | 10800000 | 11700000 | 11400000 | 14000000 | 11000000 | 24400000 | 13100000 | 14200000 | 14500000 | 8460000 | 16300000 | I | 20240920 | N | ||||||||||
| 44140 | 프로그램 제어 메니플레이터 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 메니플레이터 [B25J9/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44140&VERSION=2 | 3023239 | Long Short Term Memory | 장단기 메모리(Long Short Term Memory) | 20210302 | 20230324 | 165 | 18 | 1 | 10 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 1 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 13.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7800000 | 4430000 | 5270000 | 5380000 | 6160000 | 5880000 | 14900000 | 4560000 | 4850000 | 518000 | 369000 | 6110000 | I | 20240920 | N | |||||||||
| 44295 | 메니플레이터에 적합한 부속 장치 | 3 | 로봇 공학 | 로봇의 구성 요소 | 메니플레이터에 적합한 부속 장치 [B25J19/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44295&VERSION=2 | 3023239 | Long Short Term Memory | 장단기 메모리(Long Short Term Memory) | 20220719 | 20230203 | 54 | 2 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 35.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7800000 | 4430000 | 5270000 | 5380000 | 6160000 | 5880000 | 14900000 | 4560000 | 4850000 | 518000 | 369000 | 6110000 | I | 20240920 | N | |||||||||
| 44183 | 프로그램 제어 | 3 | 로봇 공학 | 로봇 제어 | 프로그램 제어 [B25J9/16_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44183&VERSION=2 | 3023239 | Long Short Term Memory | 장단기 메모리(Long Short Term Memory) | 20210302 | 20230324 | 246 | 15 | 1 | 8 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 | 1 | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 9.2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7800000 | 4430000 | 5270000 | 5380000 | 6160000 | 5880000 | 14900000 | 4560000 | 4850000 | 518000 | 369000 | 6110000 | I | 20240920 | N | |||||||||
| 44314 | 타류에 속하지 않는 메니플레이터 | 3 | 로봇 공학 | 로봇의 구성 요소 | 타류에 속하지 않는 메니플레이터 [B25J11/00_main] | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44314&VERSION=2 | 3023239 | Long Short Term Memory | 장단기 메모리(Long Short Term Memory) | 20220930 | 20220930 | 547 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7800000 | 4430000 | 5270000 | 5380000 | 6160000 | 5880000 | 14900000 | 4560000 | 4850000 | 518000 | 369000 | 6110000 | I | 20240920 | N | ||||||||||
| 44252 | 로봇의 구성 요소 | 2 | 로봇 공학 | 로봇의 구성 요소 | CN | https://dx.patentpia.com/report/reportResult.hs?INPUTITEM_VARSET=TECHCATE&MENUID_3DEPTH=M3_TECHCATE_07_03_03&LOCALE=CN&UI_LANG=KO&LANG=CN&TECHCATE=44252&VERSION=2 | 3023239 | Long Short Term Memory | 장단기 메모리(Long Short Term Memory) | 20220719 | 20230203 | 131 | 3 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.0 | 35.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7800000 | 4430000 | 5270000 | 5380000 | 6160000 | 5880000 | 14900000 | 4560000 | 4850000 | 518000 | 369000 | 6110000 | I | 20240920 | N |
| 판매제공처 홈페이지 | www.patentpia.com | 라이선스 | Creative Commons Attribution |
|---|---|---|---|
| 판매 담당자 | 광개토연구소 | 권한 | Copyright 2021. PatentPia Inc. All Right Reserved |
| 연락처 | 02-569-7503 | 접근 권한 | public |
| 이메일 | kgt@patentpia.com | 상품 구분 | dataset |
| 품질측정 검사 | 품질측정기간 | ~ | |
|---|---|---|---|
| 품질측정기관 | 광개토연구소 | 품질측정연락정보 | 025697503 |
| 품질측정결과 | 품질측정내용 |
현재 준비중입니다.
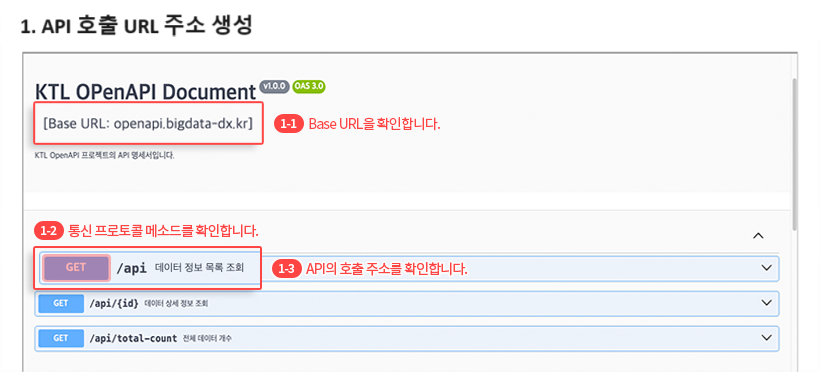
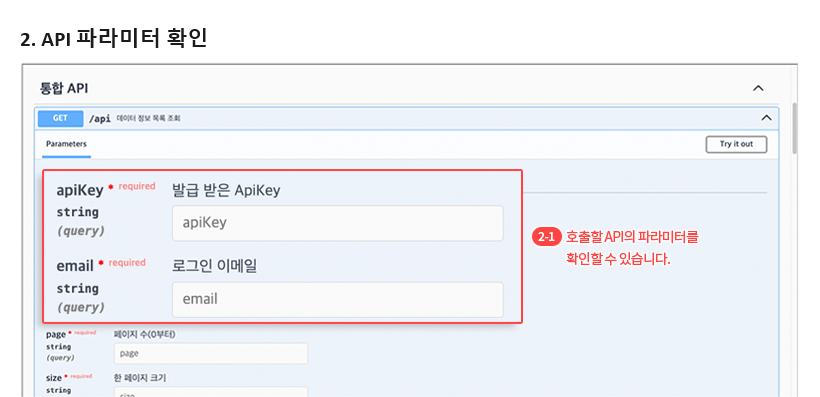
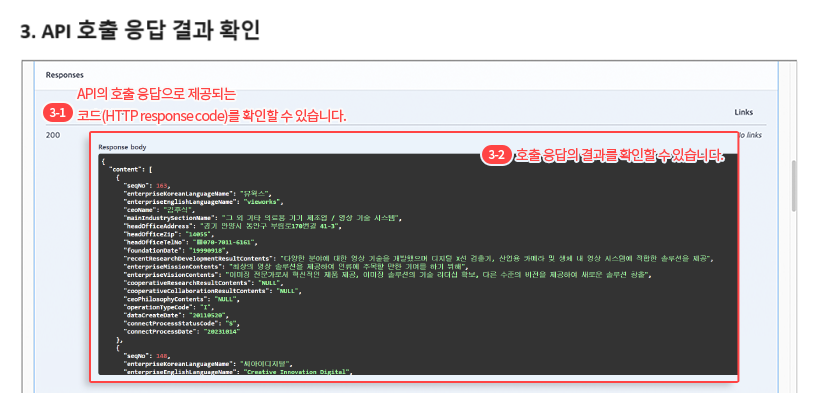
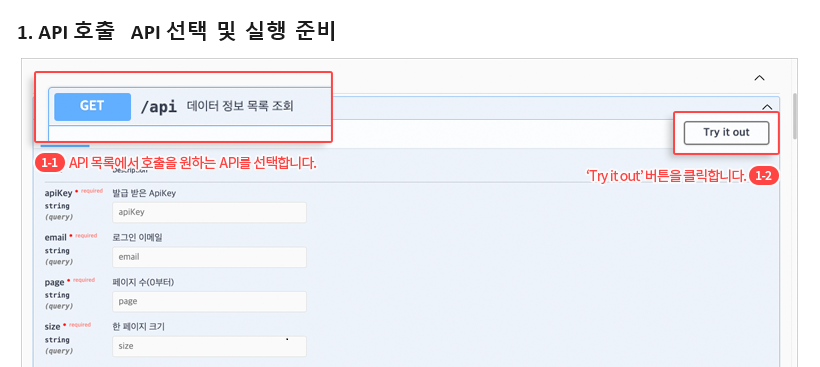
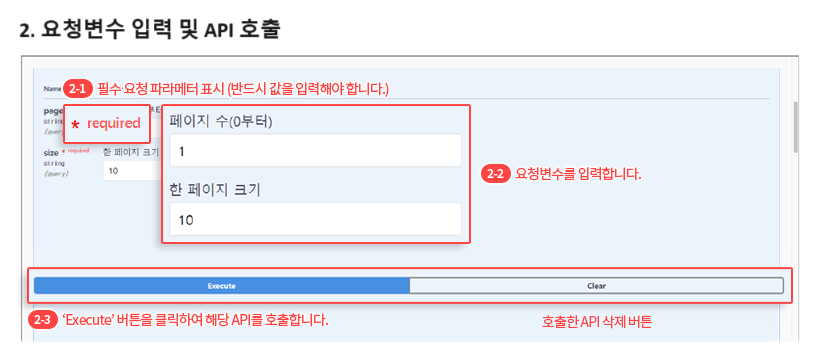
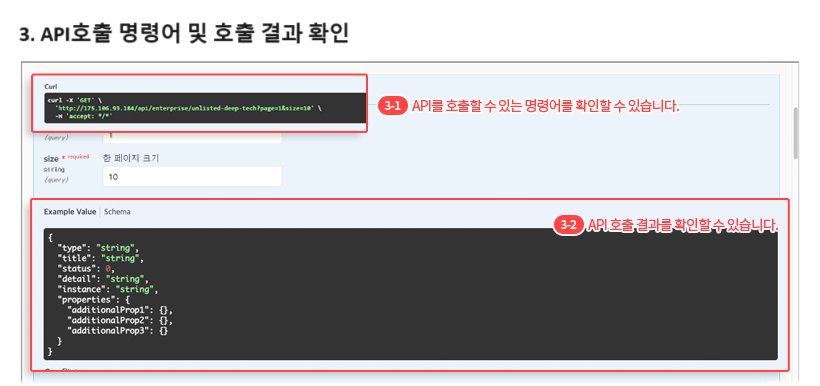




10047 경기도 김포시 양촌읍 황금1로 122,김포제조융합혁신센터 3층 한국산업기술시험원 ㅣ 사업자번호 : 113-82-06228 ㅣ 대표자명 : 김세종 ㅣ TEL: 02-860-1059 ㅣ E-mail: bigdata.dx@ktl.re.kr
Copyright ⓒ 2021 KOREA ENTERPRISE DATA. All Rights Reserved.